|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Velmi rychlé exoskelety
Petr Panchártek
Udržet rovnováhu během každodenních činností je náročné vzhledem k nestabilní povaze lidského těla. Opožděná reakční doba člověka například omezuje jeho schopnost obnovit rovnováhu po jejím narušení. Exoskelety umožňují zlepšit rovnováhu po jejím narušení tím, že reagují rychleji, než je fyziologicky možné. Avšak „nepřirozeně rychlá (umělá)“ změna točivého momentuMoment síly – točivý moment, veličina popisující schopnost působící síly otočit těleso. Jde o vektorový součin spojnice osy otáčení a místa působení (radiusvektoru) se silou. Velikost momentu síly je rovna součinu velikosti síly, radius vektoru a sinu úhlu mezi radiusvektorem a směrem síly. exoskeletuRobotický exoskelet – vnější kostra, zařízení určené k podpoře svalů člověka při chůzi nebo práci, například pro zdravotní nebo také vojenské účely. Skládá se z vnějšího rámu (kostry), která je ovládána člověkem pomocí hydrauliky a motorů. korigující rovnováhu může interferovat s následnými fyziologickými reakcemi uživatele a bránit celkové reakci reaktivní rovnováhy. Exoskelety potřebují reagovat rychleji než fyziologické reakce, aby se zlepšila rovnováha po narušení vzpřímené polohy.
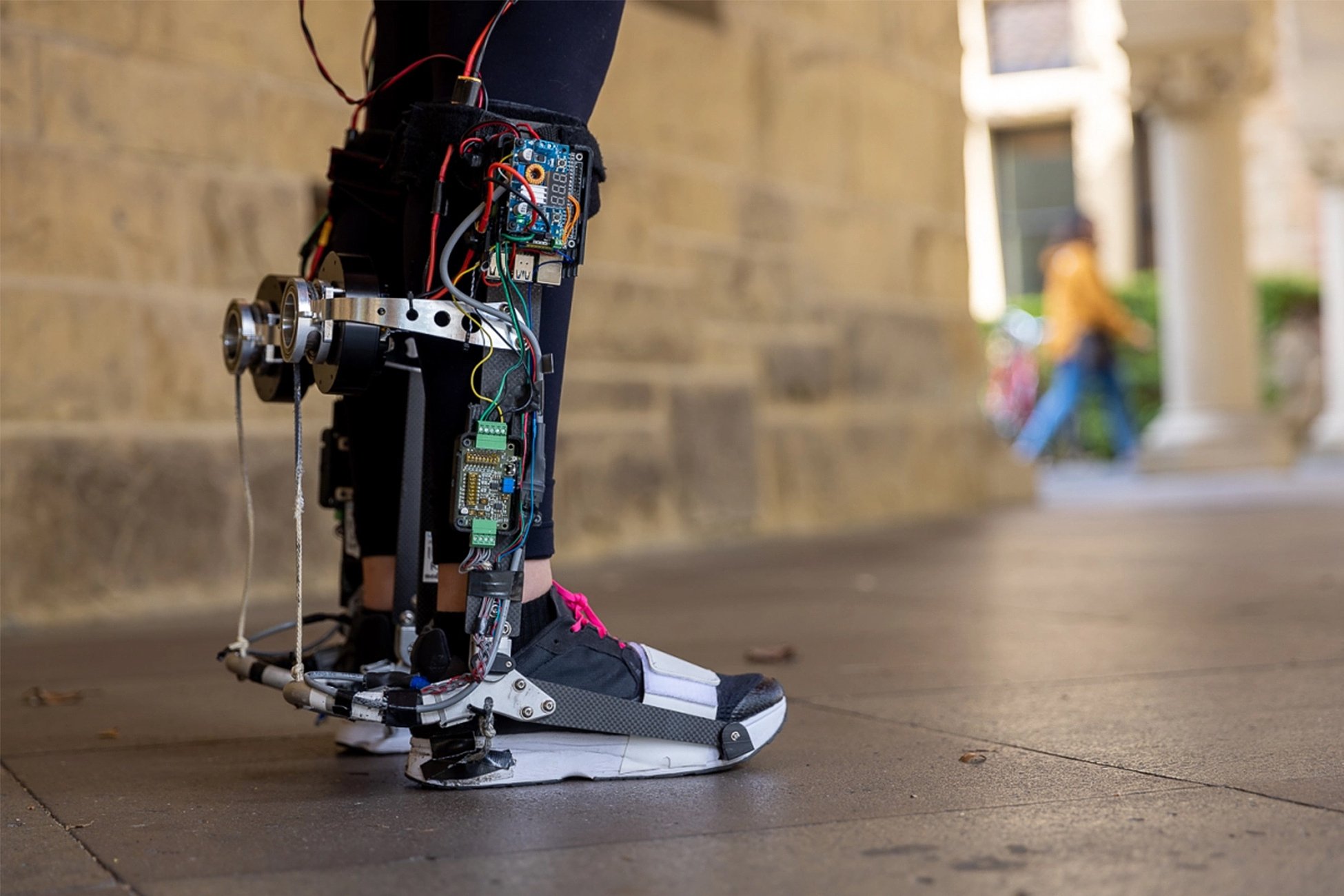
Robotický exoskelet pomáhá lidem chodit. Zdroj: NIH.
|
Robotický exoskelet – vnější kostra, zařízení určené k podpoře svalů člověka při chůzi nebo práci, například pro zdravotní nebo také vojenské účely. Skládá se z vnějšího rámu (kostry), která je ovládána člověkem pomocí hydrauliky a motorů. Myoelektrická protéza – motorické zařízení poháněné elektřinou z malého akumulátoru. Pomocí povrchových kožních elektrod, které jsou zabudovány v protézovém pahylovém lůžku na individuálně stanoveném nejvhodnějším místě se přenášejí svalové potenciály uživatele na řídící elektroniku protézy. Elektroencefalografie – EEG, technika umožňující zaznamenávat elektrickou aktivitu různých částí mozku. Užívá se k diagnostice epilepsie, spánkových poruch, nádorů apod. Existuje několik rytmů zaznamenávaných při EEG (alfa, beta, delta, theta rytmus). Perturbace – porucha. Tento pojem je základem perturbačního počtu, při kterém hledáme odchylky od známého řešení v podobě nekonečné řady poruch. Zpravidla se omezíme na několik prvních členů, někdy jen na první člen. Příkladem může být porucha dráhy nějakého tělesa způsobená interakcí s jiným tělesem. Hmotný střed – místo, kterým je daný objekt možné nahradit, pokud ho chceme považovat za jediný bod (tzv. hmotný bod). Hmotný střed je působištěm vnějších sil, proto se mu v přítomnosti tíže říká těžiště. Látka tělesa je kolem hmotného středu rovnoměrně rozložena. Střed tlaku – střed rozložení tlaku, pojem často používaný v medicíně, kde znamená bod, kolem něhož je rovnoměrně distribuována výsledná kontaktní resp. reakční síla působící po celé styčné ploše jednoho chodidla, popř. dalších segmentů těla. |
Exoskelet
Vzpřímený bipedálníBipedální – dvounohý, týkající se obou nohou. postoj lidského těla ztěžuje ze své podstaty udržení rovnováhy při každodenních úkolech. Udržení rovnováhy ve stoje komplikuje relativně vysoká poloha těžištěHmotný střed – místo, kterým je daný objekt možné nahradit, pokud ho chceme považovat za jediný bod (tzv. hmotný bod). Hmotný střed je působištěm vnějších sil, proto se mu v přítomnosti tíže říká těžiště. Látka tělesa je kolem hmotného středu rovnoměrně rozložena. a malá základna, což vyžaduje neustálou produkci aktivní svalové síly. Při narušení rovnováhy trvají fyziologické procesy asi 130 ms, teprve poté začnou kotníky produkovat reaktivní kloubní momenty korigující rovnováhu. Tato dlouhá prodleva omezuje schopnost člověka znovu získat stabilní rovnováhu a je způsobena především časem potřebným pro nervové vedení a zpracování. Výzkumníci začali vyvíjet nositelné exoskeletyRobotický exoskelet – vnější kostra, zařízení určené k podpoře svalů člověka při chůzi nebo práci, například pro zdravotní nebo také vojenské účely. Skládá se z vnějšího rámu (kostry), která je ovládána člověkem pomocí hydrauliky a motorů., jejichž úkolem je zlepšit lidskou rovnováhu během každodenního života a kompenzovat morfologická omezení.
Exoskelety mohou být schopny zlepšit lidskou rovnováhu tím, že reagují na poruchy rovnováhy rychleji, než je fyziologicky možné. To znamená, že elektromechanické stroje, jako jsou exoskelety, mohou detekovat mechanické změny a poskytovat točivý momentMoment síly – točivý moment, veličina popisující schopnost působící síly otočit těleso. Jde o vektorový součin spojnice osy otáčení a místa působení (radiusvektoru) se silou. Velikost momentu síly je rovna součinu velikosti síly, radius vektoru a sinu úhlu mezi radiusvektorem a směrem síly. kloubům končetin rychleji, než mohou lidé vyvolat reaktivní kloubní momenty. Díky předchozím lidským fyziologickým reakcím může „uměle rychlá“ aplikace točivého momentu teoreticky poskytnout pomoc při korekci rovnováhy rychlým pohybem končetin uživatele a přesouváním jejich středu tlakuStřed tlaku – střed rozložení tlaku, pojem často používaný v medicíně, kde znamená bod, kolem něhož je rovnoměrně distribuována výsledná kontaktní resp. reakční síla působící po celé styčné ploše jednoho chodidla, popř. dalších segmentů těla., aby pomohla zpomalit narušenou polohu těžištěHmotný střed – místo, kterým je daný objekt možné nahradit, pokud ho chceme považovat za jediný bod (tzv. hmotný bod). Hmotný střed je působištěm vnějších sil, proto se mu v přítomnosti tíže říká těžiště. Látka tělesa je kolem hmotného středu rovnoměrně rozložena..
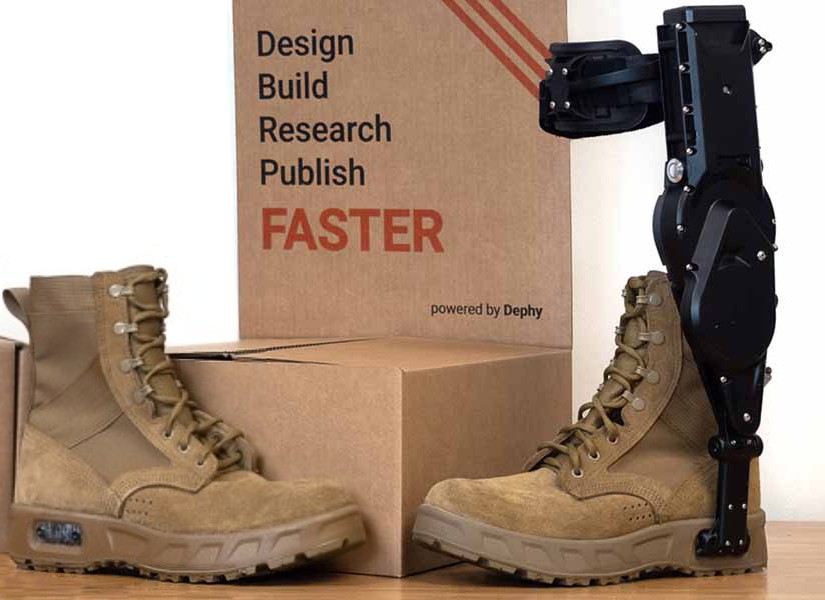
Dephy ExoBoot je jedním z mála aktivních exoskeletů zaměřených pouze na kotníky. Vychází z desetiletí výzkumu v laboratoři MIT Media Lab. Tato technologie má prokazatelné výsledky při snižování metabolických nákladů při chůzi, a to i při zohlednění hmotnosti exoskeletu. Zdroj: Exoskeleton Report.
Při obnově uživatelské rovnováhy může být snížena účinnost uměle působícího rychlého točivého momentu exoskeletu snížena, a to díky narušení základní fyziologie. I když jednoduchá dynamika obráceného kyvadla naznačuje, že uměle rychlá aplikace točivého momentu exoskeletu může zlepšit rovnováhu, rychlý točivý moment exoskeletu může způsobit počáteční reakce uživatele dané narušením senzorického vstupu, což vede k ne úplně nejlepší lidské kontrole rovnováhy exoskeletu. Po poruše rovnováhy je počáteční svalová aktivita, která vytváří měřitelné kloubní momenty dobře vysvětlena zpožděnou a škálovanou kinematikou těžiště a předpokládá se, že je řízena informacemi z receptorů pohybu z celého těla. Například bez ohledu na to, jak poruchy mění mechaniku hlezenního kloubuHlezenní kloub – kotník, latinsky articulatio talocruralis, je kloub, který spojuje kosti bérce (kost holenní a kost lýtkovou) s kostí hlezenní (jedna ze zánártních kostí). nebo bérce, zůstává pozoruhodná počáteční reaktivní aktivita plantárních flexorůPlantární flexory – svaly ohýbající dolní část nohy v hlezenním kloubu směrem k chodidlu., která pomáhá zpomalit narušenou polohu těžiště. Pokud tedy uměle rychlý točivý moment exoskeletu rychle změní polohu těžiště nebo sníží rychlost spouštění proprioreceptorůProprioreceptory – receptory zjišťující informace o poloze a pohybu těla, jedná se o podněty ze svalů, šlach a kloubních pouzder. v celém těle, může se také snížit výsledná počáteční reaktivní agonistickáAgonistický – souhlasně působící, například sval nebo lék. svalová aktivita. Experimentální data z exoskeletů zlepšujících rovnováhu však poskytují protichůdné důkazy o tom, zda točivý moment zařízení snižuje nebo zvyšuje počáteční aktivitu svalů vedoucích k obnovení rovnováhy. Některé studie exoskeletu naznačují, že točivý moment zařízení zvyšuje aktivitu svalů působících v opačném směru (antagonistůAntagonistický – opačně působící, například sval nebo lék. Slovo je odvozené z řeckého slova pro „zápasníka“.), tedy proti obnovení výchozí hodnoty, což naznačuje, že uživatelé odolávají uměle rychlým pohybům zařízení.
Zpoždění točivého momentu exoskeletuRobotický exoskelet – vnější kostra, zařízení určené k podpoře svalů člověka při chůzi nebo práci, například pro zdravotní nebo také vojenské účely. Skládá se z vnějšího rámu (kostry), která je ovládána člověkem pomocí hydrauliky a motorů. pro doplnění nezměněné fyziologické reakce uživatele může vyvolat ideální kontrolu rovnováhy mezi člověkem a exoskeletem. Takový „fyziologicky opožděný“ točivý moment by mohl být implementován pomocí myoelektrickéMyoelektrická protéza – motorické zařízení poháněné elektřinou z malého akumulátoru. Pomocí povrchových kožních elektrod, které jsou zabudovány v protézovém pahylovém lůžku na individuálně stanoveném nejvhodnějším místě se přenášejí svalové potenciály uživatele na řídící elektroniku protézy. nebo elektroencefalografickéElektroencefalografie – EEG, technika umožňující zaznamenávat elektrickou aktivitu různých částí mozku. Užívá se k diagnostice epilepsie, spánkových poruch, nádorů apod. Existuje několik rytmů zaznamenávaných při EEG (alfa, beta, delta, theta rytmus). kontroly. Funkčně by oddálení nástupu točivého momentu exoskeletu účinně škálovalo počáteční reaktivní kloubní momenty uživatele po poruše rovnováhy. Takto doplněné kloubní momenty mohou zase lépe udržet uživatele v mezích stability a zlepšit celkovou rovnováhu ve srovnání s uměle rychlým kroutícím momentem exoskeletu.
Uměle rychlý nebo fyziologicky opožděný točivý moment kotníku s ExoBoot (Dephy Inc., Maynard, MA, USA) zlepšuje rovnováhu stání uživatele ve srovnání se „základním“ stavem bez přidaného točivého momentu se skeletem ExoBoot. Protože uměle rychlé působení točivého momentu může po narušení rovnováhy vyvolat nevhodné fyziologické reakce, předpokládá se působení opožděného točivého momentu skeletu ExoBoot pro korekci rovnováhy kotníku spolu s počátečními reaktivními momenty kotníku těla, které by zlepšilo rovnováhu uživatele ve srovnání s běžnou reakcí.
Práh rovnováhy ve stoje během zpětné, polohou řízené translace
(posunutí)
opěrné plochy ExoBoot.
Zdroj: ScienceRobotics.
Při studii se sledoval práh rovnováhy stání deseti účastníků během zpětných, polohou řízených posunů opěrné plochy za třech situací se skeletem ExoBoot:
- základní točivý moment;
- nepřirozeně (uměle) rychlé působení točivého momentu;
- fyziologicky zpožděné působení točivého momentu.
Práh rovnováhy ve stoje se definoval jako velikost posunutí (translace) povrchu podpory, které způsobuje, že účastníci ztrácejí rovnováhu ve stoje v polovině případů. V průběhu každé translace opěrné plochy se hodnotila neuromechanika účastníka prostřednictvím kinematiky těžištěHmotný střed – místo, kterým je daný objekt možné nahradit, pokud ho chceme považovat za jediný bod (tzv. hmotný bod). Hmotný střed je působištěm vnějších sil, proto se mu v přítomnosti tíže říká těžiště. Látka tělesa je kolem hmotného středu rovnoměrně rozložena., mechaniky hlezenního kloubuHlezenní kloub – kotník, latinsky articulatio talocruralis, je kloub, který spojuje kosti bérce (kost holenní a kost lýtkovou) s kostí hlezenní (jedna ze zánártních kostí). a svazku šikmého lýtkového svaluŠikmý lýtkový sval – musculus soleus, hluboký sval lýtka, součást trojhlavého svalu lýtkového. a počáteční aktivity šikmého lýtkového svalu a předního holenního svalu.
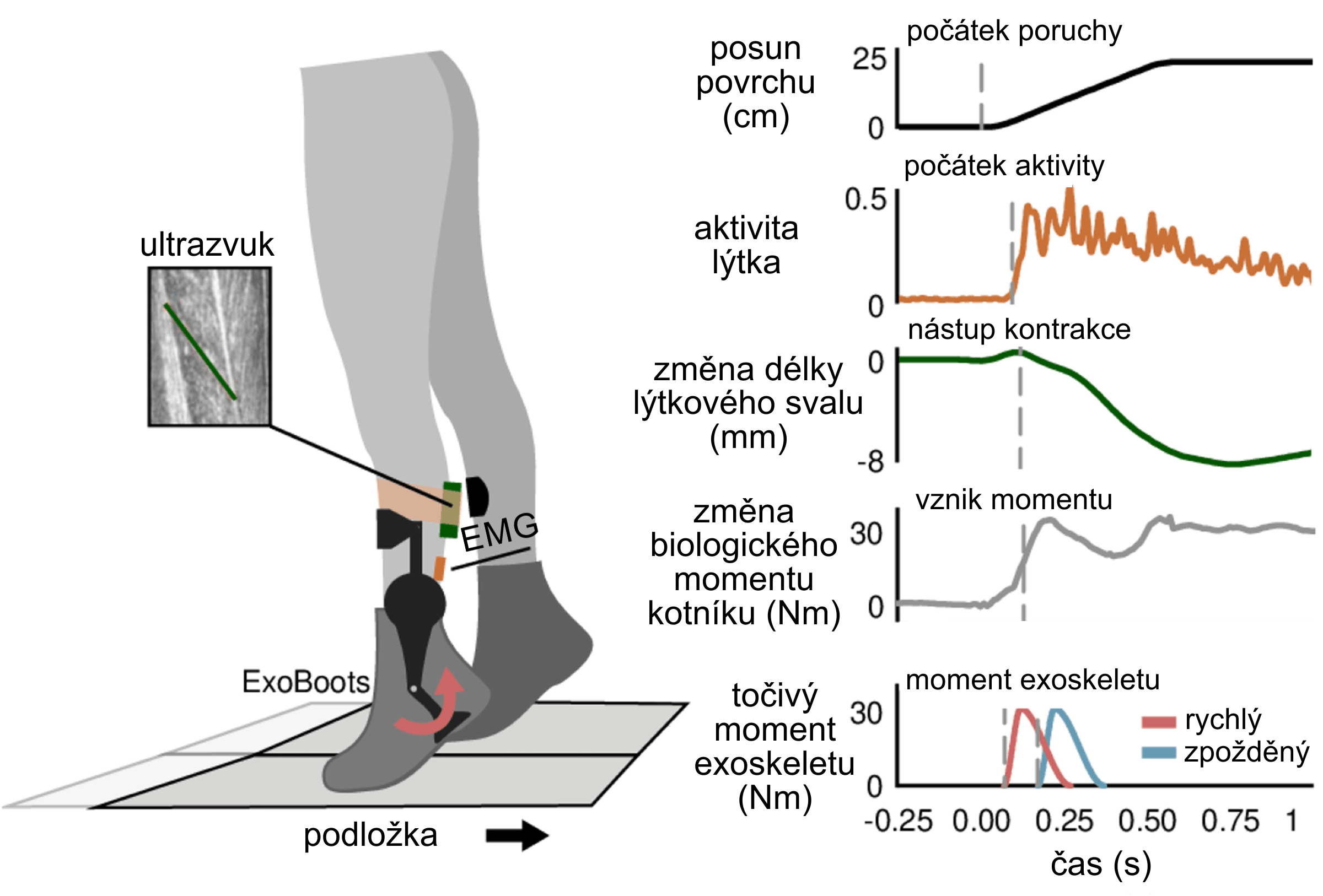
Poruchy rovnováhy a neuromechanická měření zobrazující reakci na posun
podložky
se skeletem ExoBoot. Zdroj: ScienceRobotics.
Experiment
Posun podložky ovlivnil rovnováhu uživatelů, kteří zareagovali rychlým pohybem nohou dozadu. Velikost každého posunutí podložky byla nastavena iterativním algoritmem, který odhadoval práh rovnováhy stání účastníka se skeletem ExoBoot v daném pokusu. V průběhu testů se skeletem ExoBoot byl náhodně aplikován jeden ze tří průběhů točivého momentu: základní, uměle zrychlený a fyziologicky opožděný. Základní průběh udržoval 1 Nm plantarflexníhoPlantarflexe – pohyb kotníku zvětšující úhel mezi nohou a chodidlem (například při výponu na špičky). Svaly zodpovědné za plantarflexi se nazývají plantární flexory, k nejvýznamnějším patří šikmý lýtkový sval. Opakem je zmenšení úhlu neboli dorsiflexe. točivého momentu po celou dobu zkoušky. Uměle zrychlený průběh aplikoval plantarflexní točivý moment začínající v čase 68 ms po nástupu poruchy, stoupající na 30 Nm během 50 ms a poté klesající na nulu během následujících 150 ms. Fyziologicky opožděný průběh poskytl točivý moment začínající v čase 171 milisekund po vzniku poruchy a vytvořil identický profil točivého momentu jako uměle zrychlený průběh.
V souladu s návrhem studie uměle rychlého a fyziologicky opožděného průběhu s ExoBoot poskytoval plantarflexníPlantarflexe – pohyb kotníku zvětšující úhel mezi nohou a chodidlem (například při výponu na špičky). Svaly zodpovědné za plantarflexi se nazývají plantární flexory, k nejvýznamnějším patří šikmý lýtkový sval. Opakem je zmenšení úhlu neboli dorsiflexe. točivý moment před a spolu s (nebo mírně po) počátečních kloubních reakcích účastníka. Během základního průběhu začal největší plantární sval účastníka, tj. šikmý sval lýtkový, produkovat reaktivní svalovou aktivitu (101±14) ms po vzniku poruchy. Ultrazvuk ukázal, že se svazky šikmého lýtkového svalu účastníků začaly zkracovat v čase (108±22) ms po nástupu poruchy. Točivý moment korigující rovnováhu pravděpodobně začal (vzhledem k prodlevě mezi počátečním zkrácením svalového svazku a produkcí měřitelného momentu kotníku) asi 130 ms po vzniku poruchy.
Rovnovážný práh stání
Uměle zrychlený točivý moment s ExoBoot zlepšil rovnovážný práh stání účastníků ve srovnání se základním průběhem, zatímco fyziologicky opožděný točivý moment s ExoBoot nikoli. Číselně: účastníci vydrželi o 9 % větší poruchy, když ExoBooty aplikovaly uměle zrychlený točivý moment ve srovnání s výchozí hodnotou (P < 0,001). Aplikace opožděného točivého momentu spolu s počátečními reaktivními momenty těla však nezlepšila rovnovážný práh stání oproti výchozí hodnotě (P = 0,128). Společně tato data ukazují, že exoskelety potřebují reagovat rychleji, než je fyziologicky možné, aby zlepšily uživatelův rovnovážný stav stání.
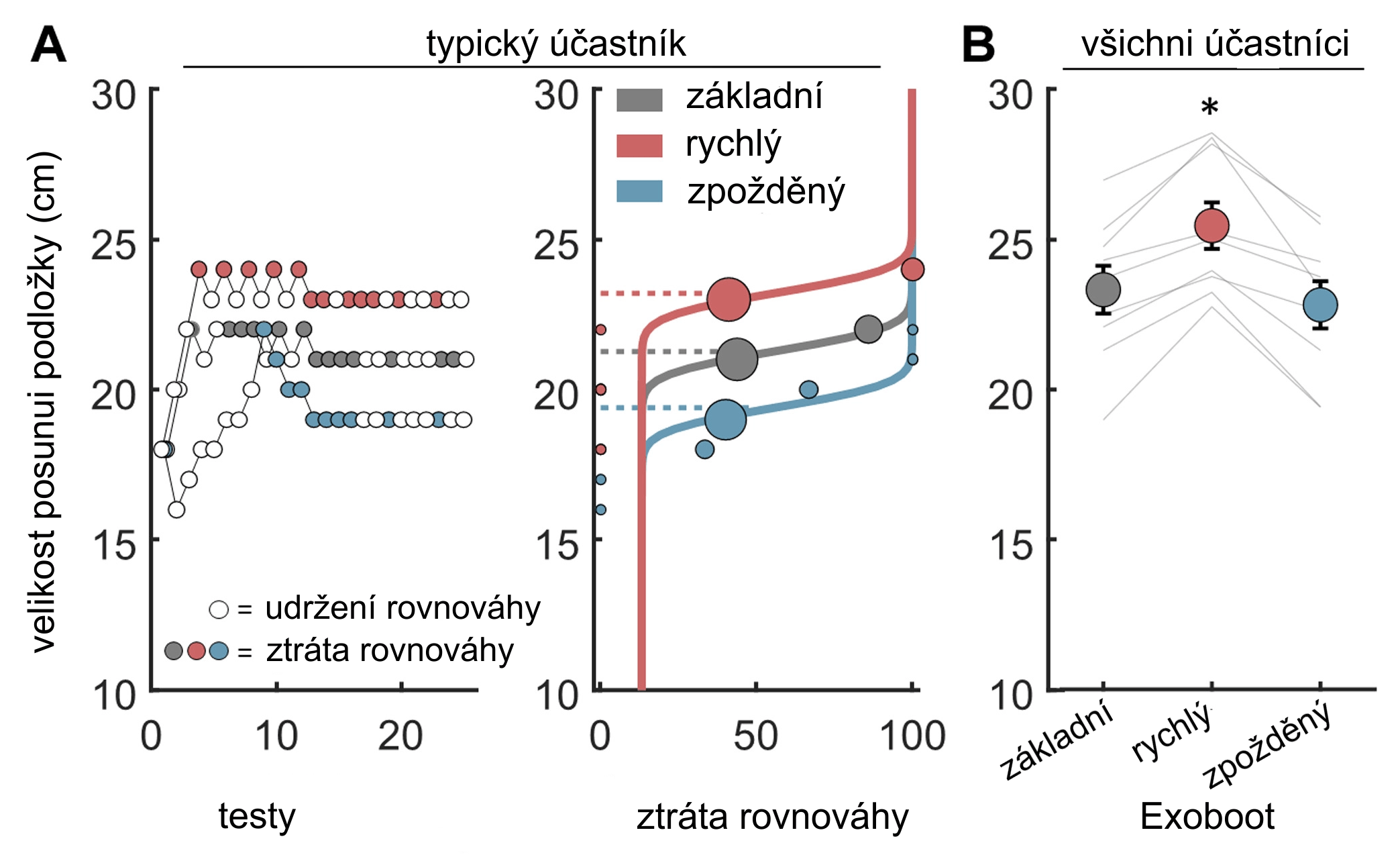
(A) Vlevo: Série experimentálních zkoušek reprezentativního účastníka podle stavu s ExoBoot: základní (šedá), uměle rychlá (červená) a fyziologicky opožděná (modrá). Podmínky s ExoBoot jsou náhodně prokládány. Vyplněné symboly označují, že účastník nebyl schopen udržet rovnováhu ve stoje během příslušného pokusu. Vpravo: Procento, kdy reprezentativní účastník nebyl schopen udržet rovnováhu při každé velikosti posunu povrchu a stavu s ExoBoot. Velikost symbolu je úměrná počtu experimentálních zkoušek při uvedené velikosti posunu povrchu podpory a stavu ExoBoot. Plné čáry jsou psychometrickou křivkou, která určuje práh rovnováhy ve stoje, což je velikost posunu podložky, kdy účastníci nebyli schopni udržet rovnováhu ve stoje polovinu času. (B) Průměrné prahové hodnoty rovnovážného prahu stání s ExoBoot (barevné symboly) s údaji jednotlivých účastníků (šedá, n = 9). Hvězdička (*) označuje význam mezi uměle rychlými a alternativními podmínkami (P < 0,05). Zdroj: Science Robotics.
Mechanika těžiště
Uměle rychlý točivý moment s ExoBoot lépe udržoval těžiště uživatele nad podložkou v porovnání se základním uspořádáním. To, jak uměle rychlý točivý moment s ExoBoot změnil uživatelskou mechaniku oproti fyziologicky opožděnému nástupu točivého momentu, se vyhodnocovalo reakcí těžiště 150 ms po nástupu poruchy. Po uplynutí 150 ms přenesl uměle rychlý točivý moment s ExoBoot střed tlaku uživatele o 88 % dále vpřed, než je výchozí hodnota. V průběhu posunu podložky tento časný přesun středu tlaku mírně snížil maximální zrychlení těžiště, snížil maximální rychlost těžiště o 17 % a snížil vodorovnou vzdálenost těžiště od středu podložky o 21 % oproti základnímu uspořádání.
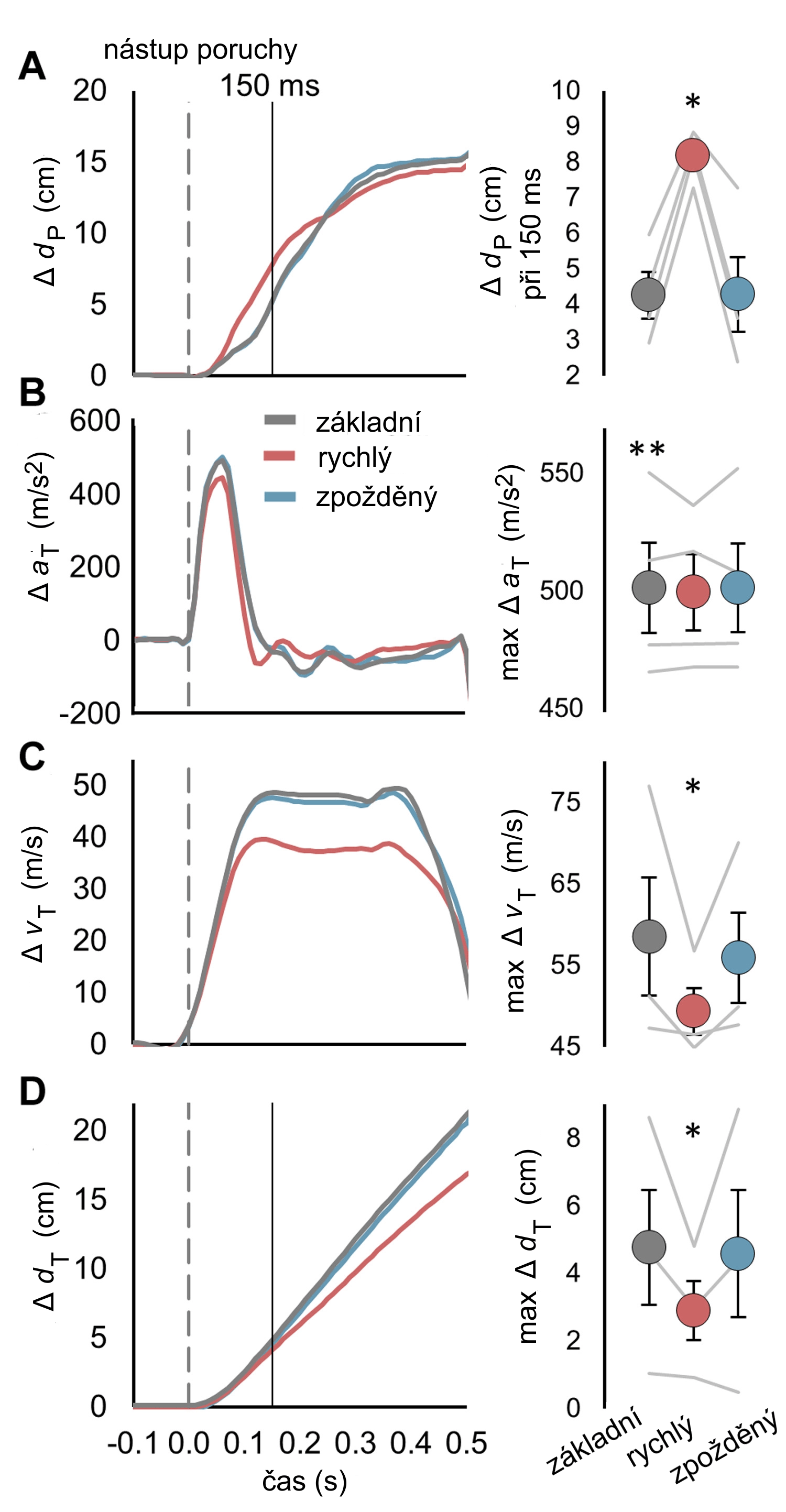
Kinematika těžiště. Vlevo: Údaje časové řady průměrného horizontálního (A) posunutí středu tlaku, (B) zrychlení těžiště, (C) rychlosti těžiště a (D) těžiště mínus základna posunutí podložky při stejné velikosti poruchy. Svislé přerušované a plné čáry označují počátek poruchy a 150 ms poté. Vpravo: Průměr (A) posunutí těžiště 150 ms po začátku poruchy, (B) špičkové zrychlení těžiště, (C) špičková rychlost těžiště a (D) těžiště mínus střed podložky s údaji jednotlivých účastníků (šedá). (A) a (B) obsahují n = 4 a (B) a (C) obsahují n = 3. Zobrazení jsou pouze účastníci, kteří provedli úspěšné pokusy s udržováním rovnováhy v každém stavu s ExoBoot při stejné velikosti poruch. Kladné hodnoty osy y indikují pohyb těla vzhledem k základně opory ve směru, kterým je účastník otočen. Statistiky se týkají všech analyzovaných účastníků v různých velikostech poruch (n = 9). Jedna hvězdička (*) označuje významnost mezi výchozími a uměle rychlými podmínkami s ExoBoot (P < 0,05). Dvojité hvězdičky (**) označují významnou interakci mezi stavem s ExoBoot a posunem povrchu podpory, který poskytuje větší maximální zrychlení těžiště v základní linii oproti ostatním dvěma průběhům. Zdroj: ScienceRobotics.
Na rozdíl od uměle rychlého točivého momentu došlo k fyziologicky opožděnému nástupu točivého momentu příliš pozdě na to, aby změnilo uživatelskou biomechaniku během 150 ms po začátku poruchy. Fyziologicky opožděný točivý moment však zvýšil dopředný posun středu tlaku o 7 % za 300 ms po začátku poruchy, což mírně snížilo maximální zrychlení těžiště oproti výchozí hodnotě. Tato malá změna v zrychlení těžiště měřitelně nesnížila špičkovou rychlost těžiště ani vodorovný posun od podložky vzhledem k základnímu uspořádání.
Mechanika kotníku
V kotníku uměle rychlý i fyziologicky opožděný točivý moment zvýšil celkové kloubní momenty a snížil dorzální flexiDorsiflexe – pohyb kotníku zmenšující úhel mezi nohou a chodidlem (například přitažení prstů vzhůru). Odpovídající svaly se nazývají dorzální flexory, typickým příkladem je holenní sval. Opakem je zvětšení úhlu neboli plantarflexe. způsobenou posunem podložky. Uměle rychlý točivý moment zvyšoval celkové kotníkové momenty během počátečních 150 ms po nástupu poruchy. Takové momenty snížily maximální dorzální flexi o 85 % a převedly kotník do rotací plantární flexePlantarflexe – pohyb kotníku zvětšující úhel mezi nohou a chodidlem (například při výponu na špičky). Svaly zodpovědné za plantarflexi se nazývají plantární flexory, k nejvýznamnějším patří šikmý lýtkový sval. Opakem je zmenšení úhlu neboli dorsiflexe. o 57 % dříve než během základního uspořádání. Během 300 ms od počátku poruchy zvýšil fyziologicky zpožděný točivý moment maximální celkový moment kotníku o 17 %, přestože došlo k o 30 % nižším momentům biologického kotníku oproti výchozímu uspořádání. Tyto zvýšené celkové momenty kotníku snížily maximální dorzální flexi kotníku o 14 % a iniciovaly plantární flexi o 22 % dříve ve srovnání s výchozím uspořádáním.
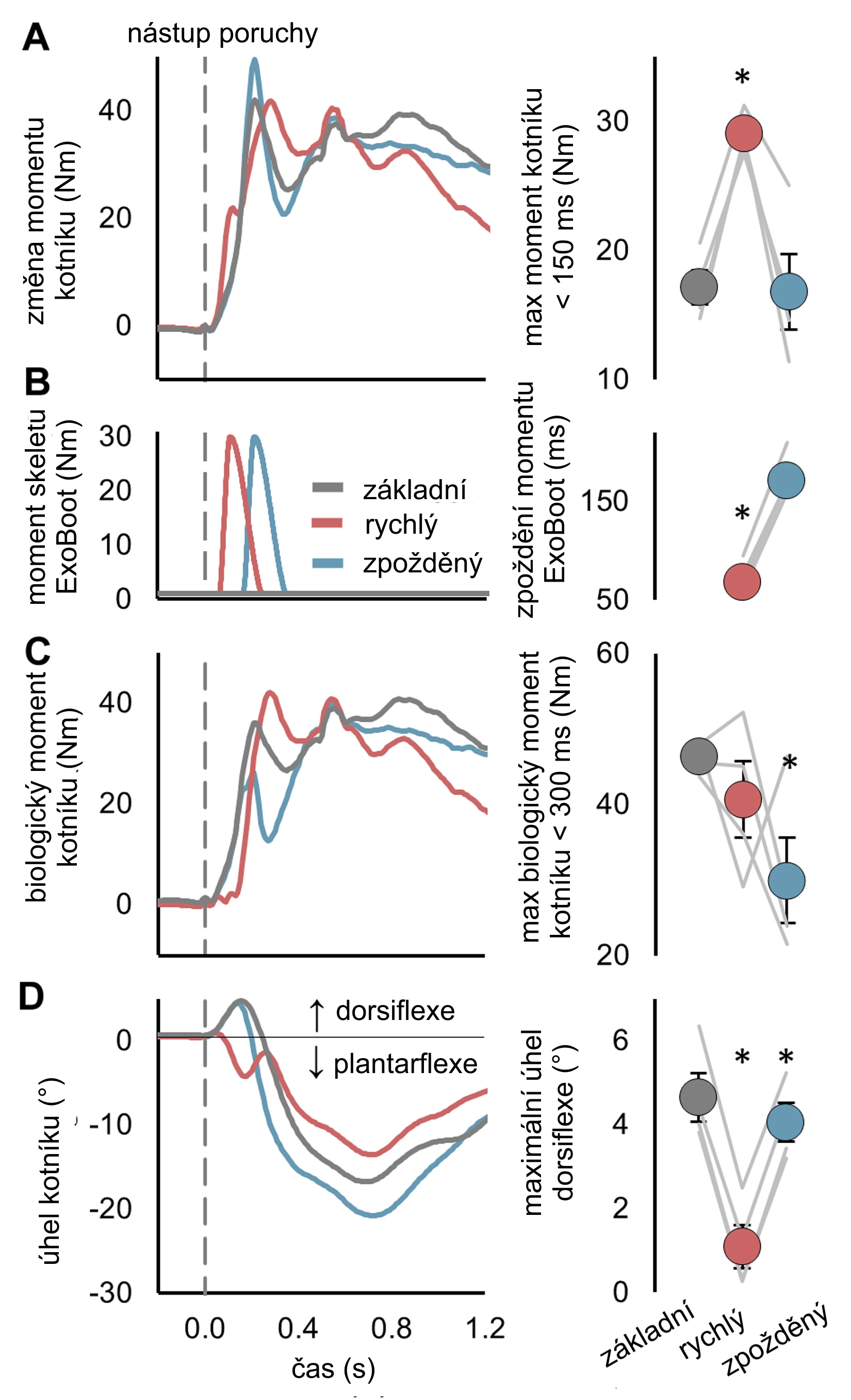
Mechanika kotníku. Vlevo: Údaje časové řady průměrného (A) čistého momentu kotníku, (B) točivého momentu s ExoBoot, (C) čistého biologického momentu kotníku a (D) úhlu kotníku. Vpravo: Průměrný (A) špičkový moment kotníku do 150 ms po velikosti poruchy, (B) zpoždění mezi nástupem poruchy a nástupem točivého momentu s ExoBoot, (C) maximální produkce momentu biologického kotníku v průběhu posunu podložky (0 až 500 ms), a (D) vrcholová změna v dorzální flexi kotníku během posunu podložky s údaji jednotlivých účastníků (šedá). Panely obsahují n = 4, s výjimkou (B), která zahrnuje n = 8. Zobrazeni jsou pouze účastníci, kteří provedli úspěšné pokusy s udržením rovnováhy v každém uspořádání s ExoBoot při stejné velikosti poruchy. Statistiky se týkají všech analyzovaných účastníků v různých velikostech poruch (n = 9). Hvězdičky (*) označují význam mezi indikovaným uměle rychlým nebo fyziologicky opožděným stavem s ExoBoot. Zdroj: Science Robotics.
Mechanika svalového svazku
Uměle rychlý točivý moment prakticky eliminoval tažnou sílu a roztažení svalového svazku lýtka v důsledku posunu podložky a změny mechaniky kotníku. Konkrétně uměle rychlý točivý moment snížil sílu svazku lýtkového svalu po nástupu poruchy (o 73 % menší síla svazku 150 ms po nástupu poruchy). Kromě toho snížené síly podél svalu a šlachy přispěly k o 76 % menšímu maximálnímu natažení svazku šikmého lýtkového svalu a k o 46 % pomalejším prodlužovacím rychlostem. Alternativně fyziologicky opožděný točivý moment nezměnil mechaniku kotníku natolik, aby vyvolal měřitelné rozdíly v maximálním natažení svazku šikmého lýtkového svalu, rychlosti nebo jejich době oproti základnímu uspořádání.
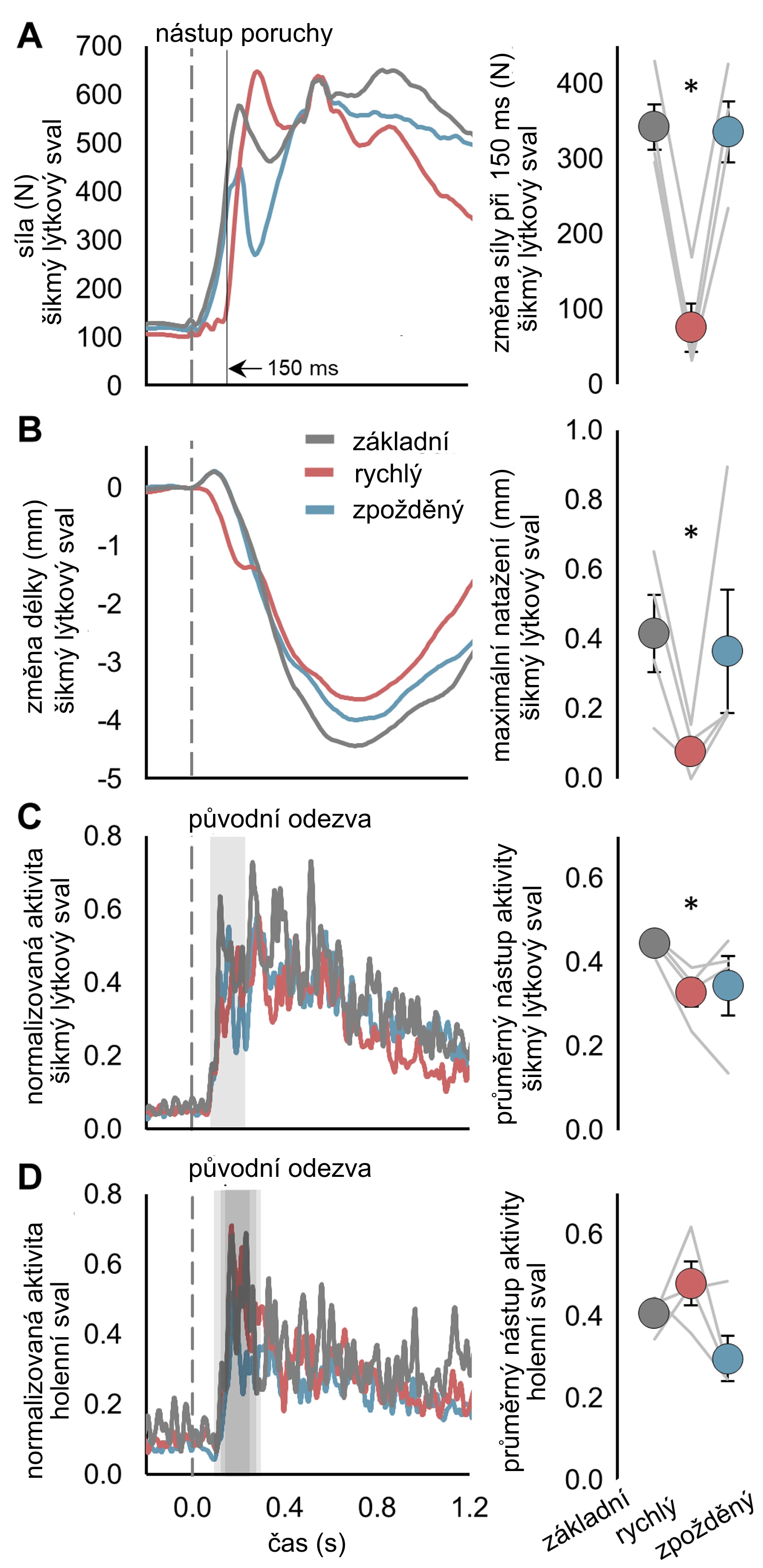
Neuromechanika šikmého lýtkového svalu. Vlevo: Údaje časové řady průměrné (A) síly svazku šikmého lýtkového svalu, (B) změny délky svazku šikmého lýtkového svalu, (C) normalizované aktivace šikmého lýtkového svalu a (D) normalizované aktivace předního svalu holenního. Svislé přerušované a plné čáry označují počátek poruchy a 150 ms poté. Stínované oblasti ukazují okno počátečního nástupu reakční svalové aktivity. Vpravo: Průměrná (A) síla šikmého lýtkového svalu 150 ms po nástupu poruchy, (B) maximální natažení šikmého lýtkového svalu, (C) normalizovaná počáteční reaktivní svalová aktivita a (D) normalizovaná počáteční reaktivní svalová aktivita předního holenního svalu, s údaji jednotlivých účastníků (šedá). Panely obsahují n = 4. Zobrazeni jsou pouze účastníci, kteří provedli úspěšné pokusy s udržováním rovnováhy v každém stavu s ExoBoot při stejné velikosti poruchy. Statistiky se týkají všech analyzovaných účastníků v různých velikostech poruch. Hvězdičky (*) označují význam mezi indikovaným uměle rychlým nebo fyziologicky opožděným stavem ExoBoot. Zdroj: Science Robotics.
Reaktivní svalová aktivita
Protože uměle rychlý točivý moment s ExoBoot redukoval vychýlení těžiště, dorzální flexiDorsiflexe – pohyb kotníku zmenšující úhel mezi nohou a chodidlem (například přitažení prstů vzhůru). Odpovídající svaly se nazývají dorzální flexory, typickým příkladem je holenní sval. Opakem je zvětšení úhlu neboli plantarflexe. kotníku a sílu a natažení svazku lýtkového svalu během počátečních 150 ms po nástupu poruchy oproti výchozí hodnotě, smyslové signály řídící počáteční motorické reakce byly pravděpodobně sníženy. Výsledky ukazují, že uměle rychlý točivý moment snížil počáteční reaktivní svalovou aktivitu šikmého lýtkového svalu o 18 % ve srovnání s výchozí hodnotou. Ani uměle rychlý, ani fyziologicky opožděný točivý moment nezměnily latenci počáteční reaktivní svalové aktivity šikmého lýtkového svalu oproti výchozí hodnotě. Fyziologicky opožděný točivý moment neovlivnil amplitudu počáteční reaktivní svalové aktivity šikmého lýtkového svalu oproti výchozí hodnotě. Navíc, na rozdíl od předchozích experimentů s exoskeletem, počáteční reaktivní svalová aktivita ve svalu primárního antagonistyAntagonistický – opačně působící, například sval nebo lék. Slovo je odvozené z řeckého slova pro „zápasníka“. (předního svalu holenního) nebyla změněna.
Další analýzy naznačují, že počáteční reaktivní aktivita plantárního flexoruPlantarflexe – pohyb kotníku zvětšující úhel mezi nohou a chodidlem (například při výponu na špičky). Svaly zodpovědné za plantarflexi se nazývají plantární flexory, k nejvýznamnějším patří šikmý lýtkový sval. Opakem je zmenšení úhlu neboli dorsiflexe. má lepší vztah k celotělové mechanice než lokální mechanické změny kotníku nebo svalového svazku. Svalové proprioreceptoryProprioreceptory – receptory zjišťující informace o poloze a pohybu těla, jedná se o podněty ze svalů, šlach a kloubních pouzder. primárně řídí počáteční nástup reaktivní svalové aktivity. Rychlost těžiště uživatele představovala o 0,27 až 0,45 větší rozptyl (škála 0 až 1) v počáteční reaktivní svalové aktivitě šikmého lýtkového svalu ve srovnání s každým z výše uvedených parametrů na úrovni těžiště, kotníku a svalů ve studiích. V rámci uměle rychlých zkoušek s ExoBoot rychlost těžiště vysvětlila o 0,57 až 0,78 větší rozptyl v počáteční reaktivní svalové aktivitě šikmého lýtkového svalu než alternativní uspořádání experimentů.
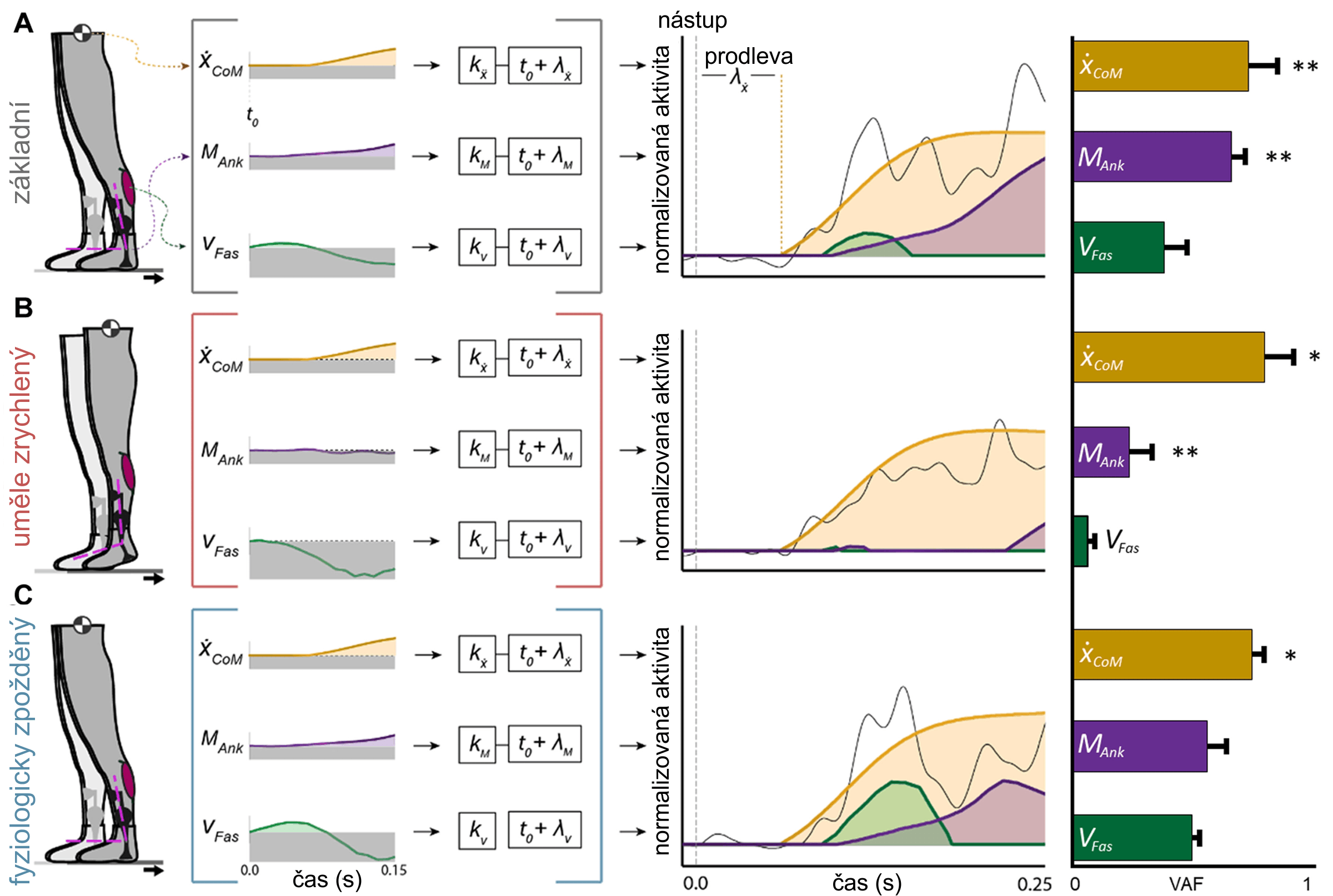
Globální a lokální mechanika související s reaktivní aktivitou šikmého lýtkového svalu. (Vlevo) Zobrazení posunů povrchu podpory s každou podmínkou s ExoBoot asi 100 ms po začátku poruchy. (Vlevo uprostřed) Reprezentativní časová řada mechanických měření se zisky (ksub) a zpožděními (λsub) přičtenými k času nástupu poruchy (t0) (n = 1). (Vpravo uprostřed) Reprezentativní normalizovaná aktivita šikmého lýtkového svalu (černá čára) s nejlepším přizpůsobením odpovídajících mechanických měření (barevně šrafovaná) s vyladěnými zisky a konstantním zpožděním (n = 1). (Vpravo) Rozptyl počáteční reaktivní svalové aktivity šikmého lýtkového svalu (VAF) podle každého mechanického měření mezi účastníky (n = 8). (A), (B) a (C) zobrazují výchozí stav, uměle rychlý a fyziologicky opožděný stav s ExoBoot, v daném pořadí. Tři uvedené biomechanické míry jsou rychlost těžiště (zlatá), čistý moment kotníku (fialová) a rychlost prodlužování svazku šikmého lýtkového svalu (zelená). Hvězdička (*) označuje významnost mezi rychlostí těžiště a dalšími proměnnými. Dvě hvězdičky (**) označují významnost mezi uvedenou proměnnou a rychlostí svazku. Zdroj: Science Robotics.
Závěr
K dnešnímu dni je působení exoskeletového točivého momentu na klouby nohou uživatele rychlejší, než je možné fyziologicky. Zlepšila se rovnováha uživatele během stání (současná studie) a reaktivního krokování. V souladu s výsledky rovnováhy ve stoje ukázala předchozí studie, že působení točivého momentu exoskeletu ve fyziologických prodlevách nezlepšilo rovnováhu uživatele během narušené chůze. Předchozí studie exoskeletového krokování a chození používaly poruchy iniciované změnou těžiště, které pravděpodobně vyvolaly větší počáteční vizuální a vestibulární senzorickou zpětnou vazbu než posuny povrchu pod figurantem. Poruchy iniciované změnou těžiště však nepřinášejí rychlejší reakce uživatele než povrchové posuny. Navíc se u různých poruch rovnováhy i během chůze se kinematika těžiště vztahuje k opožděným reakcím na změnu rovnováhy uživatele. Umístění senzorů v blízkosti těžiště uživatele může lépe informovat o točivém momentu exoskeletu korigujícího rovnováhu než senzory umístěné dále od těžiště. Exoskelety pro každodenní použití brzy zlepší rovnováhu uživatele a budou předvídat a předcházet základní fyziologické reakce na poruchy rovnováhy.
„Chůze vznikla tím, že si kroky vyměňovaly zkušenosti.“ Václav Kubín.
Odkazy
- Owen N. Beck et al.: Exoskeletons need to react faster than physiological responses to improve standing balance; Science Robotics, 15 Feb 2023
- Brian Doctrow: Robotic exoskeleton helps people walk; National Institutes of Health, 25 Oct 2022
- Patrik Kutílek, Adam Žižka: Určování polohy těžiště stabilometrickou plošinou; FBMI ČVUT, 2013
- Exoskeleton Report: ExoBoot
- Ortoticko protetické cenntrum, s. r.o.: Protézy myoelektrické
- Ronnie.cz: Svaly bérce – ventrální a laterální strana; 2005
- Wikipedie: Robotický exoskelet
- Wikipedie: Trojhlavý sval lýtkový
- Wikipedie: Posunutí (geometrie)
- Velký lékařský slovník: soleus
- Velký lékařský slovník: fascikl
- Velký lékařský slovník: bipedální
- Velký lékařský slovník: agonista
- Velký lékařský slovník: antagonista
- Velký lékařský slovník: plantární
- Velký lékařský slovník: flexor
- Velký lékařský slovník: elektroencefalografie
- Velký lékařský slovník: dorzální
- Definitions: Plantarflex
![]()
![]()
