|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
ANYmalové poletí ke hvězdám
Petr Panchártek
Tento bulletin navazuje na AB 49/2020 a AB 23/2023. Zájem o vědecký výzkum povrchu planet a využití zdrojů in situIn situ – na místě. Výraz pochází z latiny a znamená, že se něco vyskytuje na „svém původním místě“ a i tam je to zkoumáno. Toto původní místo je pak přesněji vytyčeno dle oboru, který popisuje zkoumaný předmět výzkumu a jeho výskyt nebo danou lokalitu. neustále roste. Mnoho zajímavých míst je pro nejmodernější planetární průzkumné roboty nepřístupných, protože roboti nejsou schopni překonat strmé svahy, nerovný terén a sypkou půdu. Současný přístup využívá jen jednoho robota, který se při průzkumu pohybuje pouze omezenou rychlostí a má jedinou sadu dovedností. Tento bulletin vám představí tým kráčejících robotů s doplňkovými dovednostmi pro průzkumné mise v náročných planetárních prostředích. Roboti jsou vybaveni účinným ovladačem lokomoce, mapovacím pipelinem pro online a postmisní vizualizaci, segmentací instancí pro zvýraznění vědeckých cílů a vědeckými nástroji pro dálkový a in situ průzkum. Do jednoho z robotů bylo integrováno navíc robotické rameno, které umožní velmi přesná měření. Kráčející roboti se mohou pohybovat rychle v náročných prostředích, jako jsou zrnité svahy se sklonem nad 25°, v sypké půdě a v nestrukturovaném terénu, což je jejich hlavní výhodou ve srovnání s kolovými roveryRover – automatické vozítko schopné vlastního pohybu určené k výzkumu těles slunenčí soustavy. Rovery využívá především NASA k výzkumu Marsu.. Nová metoda průzkumu terénu byla úspěšně otestována ve třech lokalitách: ve zkušebním loži roveru z mise Beyond Gravity ExoMars, v lomu ve Švýcarsku a ve Space Resources Challenge v Lucembursku. Tým kráčejících robotů může provádět úspěšné a efektivní mise v krátkém čase, protože má pokročilé schopnosti lokomoce, vnímání a měření a autonomii na úrovni úkolů. Nový přístup umožňuje vědecký průzkum planetárních lokalit, které jsou v současné době mimo dosah lidí a robotů.

Trojice kráčejících robotů během testu ve švýcarském štěrkovém lomu.
Zdroj: TechXplore.
|
In situ – na místě. Výraz pochází z latiny a znamená, že se něco vyskytuje na „svém původním místě“ a i tam je to zkoumáno. Toto původní místo je pak přesněji vytyčeno dle oboru, který popisuje zkoumaný předmět výzkumu a jeho výskyt nebo danou lokalitu. Pyroklastický proud – žhavé mračno, často se vyskytující projev explozivních sopečných erupcí. Jde o rychle pohyblivou, tekoucí směs žhavých sopečných plynů, úlomků magmatu a sopečného popela, jejíž teplota dosahuje od 100 °C do 1 100 °C. Regolit – vrstva nezpevněného materiálu, která pokrývá celistvé podloží. Zpravidla jde o drť vzniklou dopadem drobných těles nebo jinou erozivní činností. Vrstvu regolitu najdeme na Měsíci, v některých oblastech na Zemi i na jiných tělesech Sluneční soustavy. PTZ – Pan-Tilt-Zoom, otáčení nahoru, do stran a přiblížení. Kameru s označením PTZ lze vzdáleně (pomocí telefonu či počítače) natáčet a zoomovat s ní. End-to-end – technika testování softwaru, která ověřuje funkčnost a výkon celé softwarové aplikace od začátku do konce simulací reálných uživatelských scénářů a replikací živých dat. Jejím cílem je identifikovat chyby, které se objeví, když jsou všechny komponenty integrovány, a zajistit, aby aplikace poskytovala očekávaný výstup jako jednotný celek. |
Vize
Robotický planetární průzkum je neocenitelný pro pokrok v našem chápání Sluneční soustavy a umožňuje vyhledávání potenciálních zdrojů surovin. Nedávný závazek národních a komerčních subjektů ohledně návratu na MěsícMěsíc – přirozený satelit Země, rotuje tzv. vázanou rotací (doba oběhu a rotace je shodná). Díky tomu stále vidíme přibližně jen přivrácenou polokouli Měsíce. Měsíc je prvním cizím tělesem, na kterém stanul člověk (Neil Armstrong, 1969, Apollo 11). Voda na Měsíci byla objevena v stinných částech kráterů a pod povrchem (Lunar Prospektor, 1998). Povrch Měsíce je pokryt regolitem (drobná drť s vysokým obsahem skla). Malé pevné jádro je obklopené plastickou vrstvou (v hloubce 1 000 km pod povrchem). Velké množství kráterů má rozměry od milimetrů po stovky kilometrů. Několik z nich je pojmenováno i po českých osobnostech (například kráter Anděl). (zaměřený na udržitelnou a dlouhodobou lidskou přítomnost) podpořil nový rozvoj technologií pro robotický průzkum.
Mnoho cílů relevantních pro vědu, průzkum a těžbu zdrojů na měsíčním povrchu leží v těžce dostupných oblastech nebo v oblastech se značnou pravděpodobností setkat se s neobvyklými vlastnostmi povrchu – například s pyroklastickými průduchy, sopečnými rýhami, jeskyněmi, měsíčními moři a čerstvými impaktními krátery. Z tohoto důvodu je hlavní prioritou vývoj robotických průzkumných systémů, které dokážou efektivně procházet náročným terénem, aniž by to ohrozilo jejich průzkumnou či vědeckou činnost a jejich schopnosti vyhledávat zdroje.
Úsilí o průzkum Měsíce se točí kolem programu ArtemisArtemis – americký program návratu člověka na Měsíc. Na programu se dominantně podílí americká NASA, v menší míře i další vesmírné agentury: evropská ESA, japonská JAXA a kanadská CSA. První fáze, která bude stát 35 miliard amerických dolarů, by měla být završena přistáním člověka v oblasti jižního pólu Měsíce v roce 2025. Přistávání bude probíhat z vesmírné stanice Gateway na oběžné dráze kolem Měsíce. Program je pojmenován podle Artemis, řecké bohyně Měsíce, která byla sestrou boha hudby Apolla. Jako nosná raketa poslouží nově vyvíjená SLS. Vlastní obytná loď programu Artemis se bude jmenovat Orion. americké NASANASA – National Aeronautics and Space Administration, americký Národní úřad pro letectví a kosmonautiku, byl založen prezidentem Eisenhowerem 29. července 1958. Jde o instituci zodpovědnou za kosmický program USA a dlouhodobý civilní i vojenský výzkum vesmíru. K nejznámějším projektům patří mise Apollo, která v roce 1969 vyvrcholila přistáním člověka na Měsíci, mise Pioneer, Voyager, Mars Global Surveyor a dlouhá řada dalších., který počítá s přítomností robotů i člověka v blízkosti jižního pólu Měsíce. Jedna z prvních misí programu Artemis nese název VIPER (Volatiles Investigating Polar Exploration Rover) – vydá se do několika trvale zastíněných oblastí (chladných prohlubní), které se formovaly miliony let. Mise Artemis 3 nakonec dopraví lidi k měsíčnímu jižnímu pólu v roce 2025. Všechny tyto mise budou muset procházet náročným jižním polárním terénem, včetně strmých svahů, materiálu vyvrženého při dopadech těles, balvanitých polí a nezvyklých fyzikálních vlastností regolituRegolit – vrstva nezpevněného materiálu, která pokrývá celistvé podloží. Zpravidla jde o drť vzniklou dopadem drobných těles nebo jinou erozivní činností. Vrstvu regolitu najdeme na Měsíci, v některých oblastech na Zemi i na jiných tělesech Sluneční soustavy..
Jedním ze slibných způsobů, jak podpořit rozvoj technologií pro průzkum Měsíce a pátrání po ložiskách nerostů, jsou inovace založené na tzv. výzvách. Evropská vesmírná agentura (ESAESA – European Space Agency, Evropská kosmická agentura. ESA spojuje úsilí 18 evropských zemí na poli kosmického výzkumu. Centrální sídlo je v Paříži, pobočky jsou v mnoha členských zemích. ESA byla založena v roce 1964 jako přímý následovník organizací ESRO a ELDO. Nejznámější nosnou raketou využívanou ESA je Ariane. Česká republika vstoupila do ESA v listopadu 2008.) a Evropské inovační centrum pro vesmírné zdroje (ESRIC) založily v roce 2021 výzvu s názvem Space Resources Challenge (SRC). Jejím hlavním cílem je posun a inovace stavu robotických technologií pro průzkum Měsíce. Hlavním technickým cílem výzvy je průzkum lunárního prostředí v oblastech bohatých na nerosty (anglicky Resource Enriched Areas, zkratka REA). Patří sem oblasti, které obsahují minerály vhodné pro využití zdrojů in situIn situ – na místě. Výraz pochází z latiny a znamená, že se něco vyskytuje na „svém původním místě“ a i tam je to zkoumáno. Toto původní místo je pak přesněji vytyčeno dle oboru, který popisuje zkoumaný předmět výzkumu a jeho výskyt nebo danou lokalitu., jako je ilmenit, rutil a oxid titaničitý. Dvě kola výzvy se konala v letech 2021 a 2022, přičemž poslední soutěž probíhala v lunárním terénu v Lucembursku. Výzva zahrnovala reálné simulace nepříznivých podmínek dříve objevené na jižním pólu Měsíce, včetně neznámého terénu. Prostředí obsahovalo nezpevněné zrnité půdy spolu se slunečním osvětlením s velkým úhlem dopadu, které vytvářelo dlouhé a kontrastní stíny. Simulace počítala i se síťovou komunikací s vysokou latencí (5 s) a občasnou či úplnou ztrátou signálu.
Navržený tým kráčejících robotů je určený pro rychlý, efektivní a bezpečný průzkum a pro vyhledávání vědeckých cílů v náročných planetárních prostředích. Týmový přístup umožňuje pokrýt větší oblast, nasadit širší škálu užitečných vědeckých přístrojů, prozkoumat více vědeckých cílů a získat hlubší znalosti o každém z nich. Zvýšená zastupitelnost v týmu navíc umožňuje větší pravděpodobnost dokončení mise v případě, kdy některý z robotů selže. Operátoři posílají úkoly robotickému týmu týkající se precizní navigace, vzdáleného měření a měření in situ. Roboti provádějí tyto úkoly autonomně s pomocí svých nejmodernějších mobilních a navigačních systémů. Ve výbavě mají také doplňkové a záložní sady užitečných přístrojů. Úroveň autonomie umožňuje nepřetržitý sběr vědeckých dat i v případě, kdy se komunikace stane nespolehlivou anebo dojde k úplné ztrátě dat. Současně mohou vědci v operačním středisku během mise vybírat a upřednostňovat vědecké cíle.
Nohy versus kola
Dosud se většina planetárních průzkumných robotů spoléhala na svůj pohyb pouze s pomocí kol. Jejich pohybový systém se od doby, kdy první robotické vozítko Lunochod 1 přistálo na povrchu Měsíce v roce 1970, zásadně nezměnil. Dále můžeme zmínit například Lunar Roving Vehicle (LRV), Lunochod 2, Yutu 2 a marťanská vozítka jako Sojourner, Spirit, Opportunity, Curiosity a Perseverance. Tyto systémy mohou stavět na své osvědčené zděděné technologii a být spolehlivé v relativně rovném terénu. Kolová vozítka jsou však limitována na strmých svazích, na sypkém zrnitém terénu a v nestrukturovaných prostředích. Na Marsu se vozítko Spirit ztratilo v anomálně sypké půdě a Opportunity dočasně uvízlo v duně. Na Měsíci bylo LRV Apolla 15 uvězněno ve volném regolituRegolit – vrstva nezpevněného materiálu, která pokrývá celistvé podloží. Zpravidla jde o drť vzniklou dopadem drobných těles nebo jinou erozivní činností. Vrstvu regolitu najdeme na Měsíci, v některých oblastech na Zemi i na jiných tělesech Sluneční soustavy. a astronauti jej museli vyzvednout ručně. Podobně se Lunochodu 2 nadměrně zahrabalo kolo (více než 20 cm) poblíž kráteru Le Monnier. Tým Yutu 2 oznámil, že vstup do kráterů by byl z vědeckého hlediska určitě velmi zajímavý, ale z důvodu zvýšené pravděpodobnosti selhání lokomoce se od výzkumu tohoto druhu upustilo. Tato omezení pohybu velmi brání současným misím v průzkumu cílů s vysokou prioritou.
Mezitím však pozemští kráčející roboti dosáhli mimořádné odolnosti při průzkumu neznámých prostředí. Jejich robustní pohybový systém jim umožňuje procházet nestrukturovanými, náročnými přírodními terény, včetně bahna, štěrku, sněhu, vegetace a písku.
V minulosti již několik výzkumných týmů vyvinulo kráčející roboty se záměrem použít je v budoucnu ve vesmíru. Doposud se vědci zaměřovali na využití dynamicky kráčejících robotů ve strmých, planetárních půdách a v prostředí s nízkou gravitací, kde se ukázal značný potenciál této technologie. Aby byli tito roboti užiteční ve scénářích reálného světa, musí být pokročilí nad rámec pohybových úkolů. Musí interagovat se svým prostředím v realistických misích, například nasadit vědecké přístroje nebo odebírat vzorky.
Týmová spolupráce
Jako životaschopné řešení v pozemských misích v reálném světě se používají různorodé (heterogenní) robotické týmy. Všechny špičkové týmy ve výzvě Subterranean Challenge 2021 agentury DARPA (Defence Advanced Research Projects Agency) využívají heterogenní robotické týmy s různými dovednostmi. Aby týmy uspěly v této výzvě, musely vyvinout robustní řešení pro lokomoci, lokalizaci, mapování více robotů, místní plánování a plánování průzkumu.
Několik robotických týmů pro planetární průzkum již bylo vyvinuto i testováno v různých prostředích. Například Německé středisko pro letectví a kosmonautiku (DLRDLR – Deutsches Zentrum für Luft- und Raumfahrt, německá národní vesmírná agentura. Jde o německé národní centrum pro letectví, vesmírné lety a dopravu založené v roce 1997. Roční rozpočet je přes jednu miliardu eur. Ředitelství je v Kolíně nad Rýnem.) autonomně nasadilo dron a dvoukolové roboty, aby provedli geologický průzkum na hoře Etna před stavbou radioteleskopu. Roboti disponovali velmi vysokou úrovní autonomie, ale šlo o kolová vozítka omezená ve svých pohybových schopnostech. Německé výzkumné centrum pro umělou inteligenci (DFKI) vyvinulo heterogenní robotický tým kolových a kráčejících robotů pro sběr vzorků v lunárním prostředí. Operační středisko obsluhovalo roboty prostřednictvím trasových bodů a testovalo spíše schopnosti, jako je vzorkování v izolovaných testech, namísto plného nasazení v misi. Nedávno NASA JPLNASA JPL – Jet Propulsion Laboratory, oddělení NASA zabývající se konstrukcí raketových pohonů. NASA – National Aeronautics and Space Administration, americký Národní úřad pro letectví a kosmonautiku, založen byl v roce 1958. Jde o instituci zodpovědnou za kosmický program USA a dlouhodobý civilní i vojenský výzkum vesmíru. K nejznámějším projektům patří mise Apollo, která v roce 1969 vyvrcholila přistáním člověka na Měsíci, mise Pioneer, Voyager, Mars Global Surveyor a dlouhá řada dalších. navrhla řešení NEBULA, jehož cílem je průzkum marťanské jeskyně pomocí většího množství robotů Spot v projektu NASA BRAILLE. Jeden z robotů byl vybaven robotickým ramenem pro pořizování detailních snímků a stěrů. Podrobnosti o této práci však zatím nejsou zveřejněny. A konečně, první heterogenní robotický tým pro planetární průzkum v současné době operuje v rámci mise Mars 2020, kde vrtulník Ingenuity podporuje rover Perseverance při vyhledávání a inspekci cílů, k nimž rover nemá přístup. Tato aktuální mise na Marsu je pozoruhodným příkladem spolupráce heterogenního robotického týmu pro planetární průzkum.
Následující video představuje týmový přístup při průzkumu planetárního prostředí s dynamicky kráčejícími roboty. Navržený tým kráčejících robotů disponuje rozmanitou sadou vědeckých výzkumných dovedností a proti selhání je zajištěn řadou záložních systémů a řešení.
Tým kráčejících robotů pro planetární průzkum.
Zdroj: Curyšská polytechnika (ETH Zürich).
Jádro systému tvoří trojice kráčejících robotů. Jako základní platforma pro všechny roboty posloužil robot ANYmal, o kterém jsme podrobně psali v AB 49/2020. Každý ze tří robotů má vyhrazenou roli a jedinečnou sadu přístrojů pro průzkum a sběr vědeckých dat. Tým kráčejících robotů je ve složení Zvěd, Vědec a Hybrid:
- Primárním úkolem Zvěda je rychlé prozkoumání prostředí s pomocí přídavného senzoru pro detekci a měření vzdálenosti (LiDAR) a RGB kamer. Poskytuje operačnímu středisku, které se skládá z operátorů a planetárních vědců, přehled o dříve neznámé oblasti a umožňuje týmu identifikovat potenciální vědecké cíle. Jeho sekundárním úkolem je zachytit snímky zajímavých vědeckých cílů v různých spektrálních pásmech pomocí PTZPTZ – Pan-Tilt-Zoom, otáčení nahoru, do stran a přiblížení. Kameru s označením PTZ lze vzdáleně (pomocí telefonu či počítače) natáčet a zoomovat s ní. kontextového zobrazovače s kolem filtrů (CTX-FW).
- Hlavním úkolem Hybrida je shromažďovat vědecká data mnoha cílů pomocí PTZ kontextového zobrazovače s přídavnou termokamerou (CTX-TH). Navíc je na jeho základně namontovaný Ramanův analyzér MIRA (Metrohm Instant Raman Analyzer) s objektivem se zoomem pro získávání Ramanových spekter zájmových cílů.
- Vědec provádí hloubkovou vědeckou analýzu dříve identifikovaných cílů. Jeho základna obsahuje robotické rameno se šesti stupni volnosti s analyzérem MIRA na předloktí a mikroskopickým zobrazovačem (MICRO) na zápěstí.
Následující obrázek popisuje situaci, kdy dva operátoři na dvou řídicích stanicích mise poslali robotům cíle navigace, vzdáleného měření a měření in situ. V grafu jsou jak vědecké úkoly, které může robot provádět na dálku pomocí užitečných zatížení CTX-FW a CTX-TH, tak detailní průzkumy z blízka, konkrétně Ramanova měření přístrojem MIRA a mikroměření přístrojem MICRO. Všechny datové pakety mezi řízením mise a roboty byly schválně zpožděny o pět sekund, aby se simuloval lunární provoz. Navigační cíle byly řešeny stejným modulem na každém robotu. Trojrozměrné (3D) cíle vzdáleného měření používaly pouze snímače CTX na Zvědovi a Hybridovi. 6D cíle měření in situ byly zpracovány Hybridem a Vědcem. Roboti odeslali kontrolním stanicím mise zpětnou vazbu o svém stavu, navigační snímky, mapy v nízkém rozlišení a vědecká data pořízená při sledování objektů.
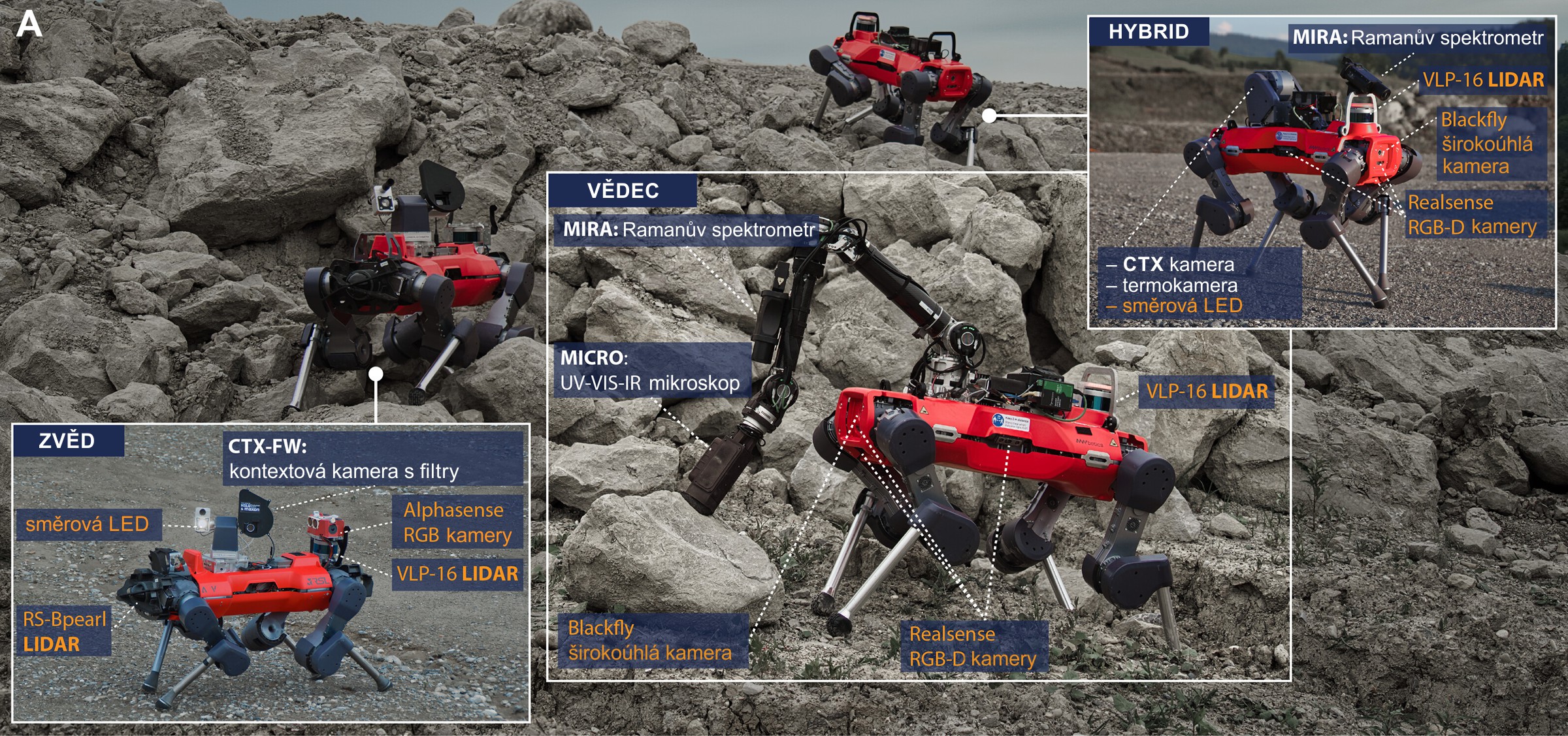
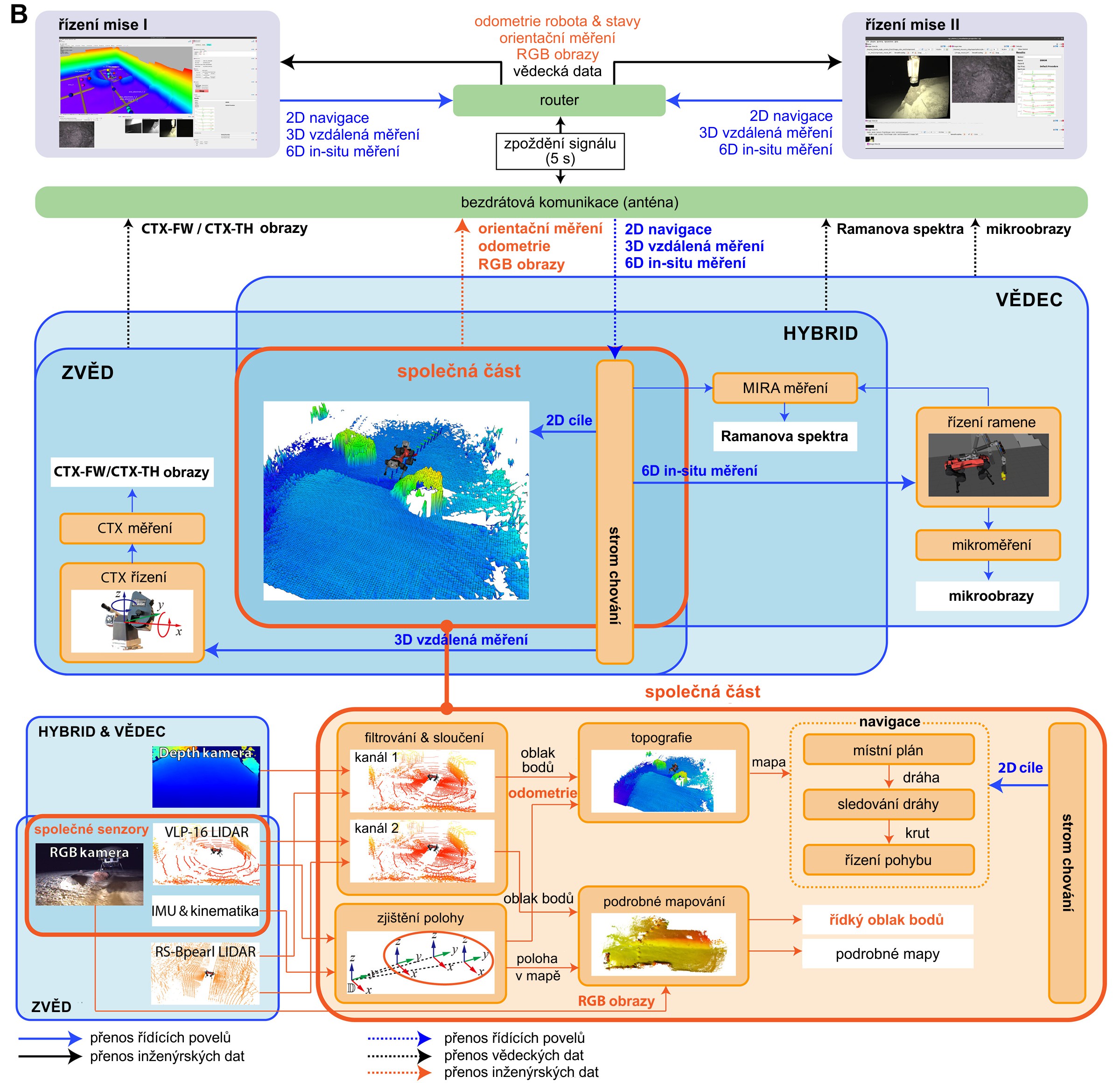
Systémová architektura týmu kráčejících robotů. (A) Robotické a vědecké užitečné zatížení na Zvědovi, Vědci a Hybridu. Robotické užitečné zatížení a vědecké užitečné zatížení jsou označeny oranžovou a bílou barvou. (B) Přehled softwarové architektury systému na vysoké úrovni. S vyváženou kombinací sdílených a specializovaných modulů byl navržen bezpečný, ale účinný systém pro více robotů v týmu. Zdroj: Science Robotics.
Ačkoli mají všichni roboti svou určenou roli, sdílejí mnoho průzkumných schopností a užitečného zatížení, což umožňuje vysokou úroveň redundance (nahraditelnosti). Pokud by některý robot selhal, může operační středisko přerozdělit úkoly mezi ostatní roboty. Následující obrázek znázorňuje, jak by mohly být úlohy přerozděleny pro příklady úloh průzkumu a měření díky konceptu redundance užitečného zatížení.
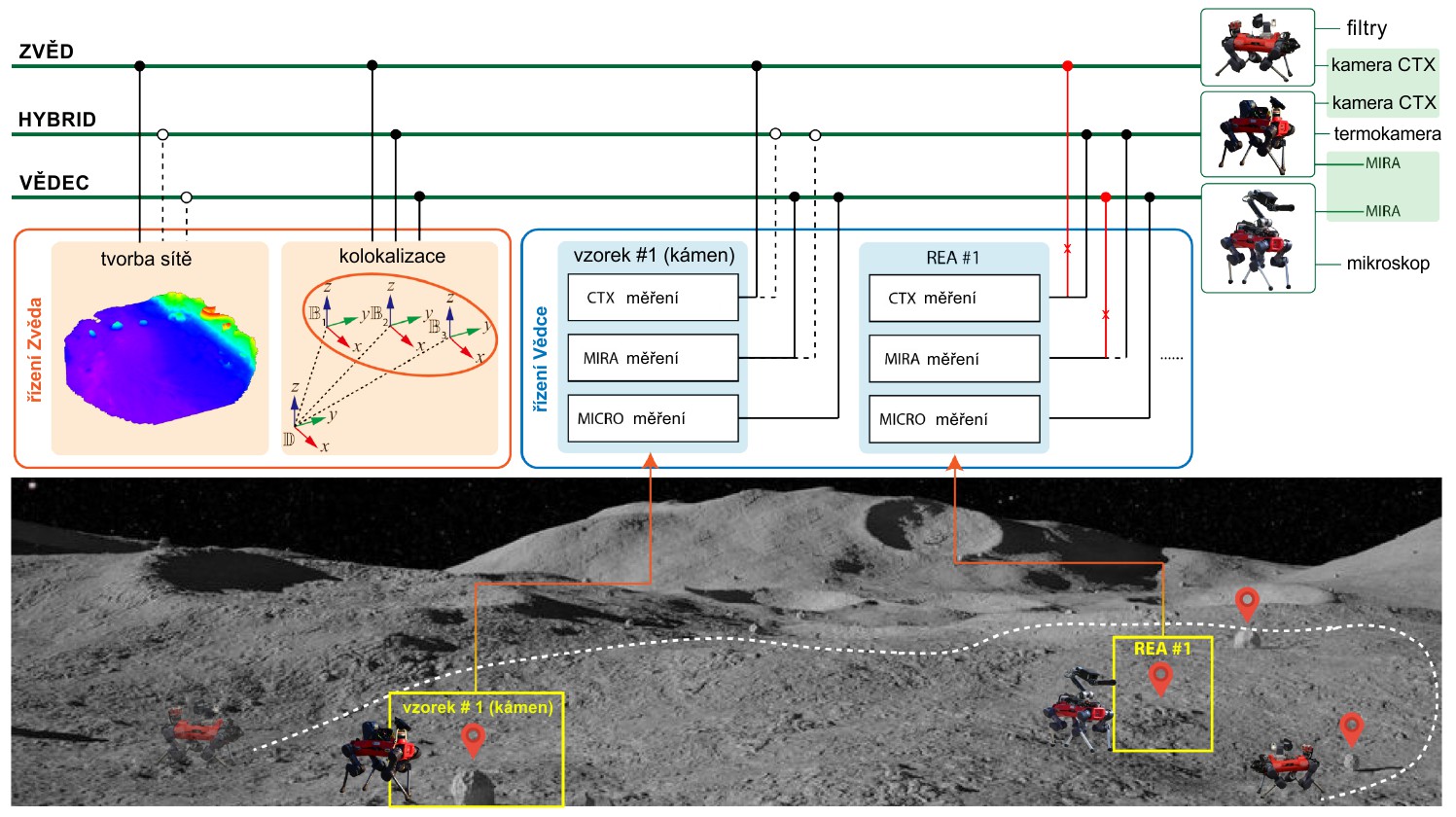
Příklad alokace úkolů v systému. Přidělené úkoly jsou zobrazeny jako plné čáry. Alternativní alokační cesty jsou zobrazeny jako přerušované čáry. Když se přidělení úkolu stane neplatným, například kvůli poruše užitečného zatížení nebo robota (červené čáry), úkoly lze přerozdělit podle konceptu redundance (nahraditelnosti). Zdroj: Science Robotics.
Zkušební kampaně
Provedly se end-to-endEnd-to-end – technika testování softwaru, která ověřuje funkčnost a výkon celé softwarové aplikace od začátku do konce simulací reálných uživatelských scénářů a replikací živých dat. Jejím cílem je identifikovat chyby, které se objeví, když jsou všechny komponenty integrovány, a zajistit, aby aplikace poskytovala očekávaný výstup jako jednotný celek. mise ve dvou měsíčních prostředích a ověřovací test pohybu v marťanském testovacím loži. V obou end-to-end misích se operační středisko skládalo celkem z pěti lidí, a to z operátorů (jeden operátor na jednoho robota), jednoho planetárního vědce a z jednoho supervizora, který zajišťoval komunikaci mezi dvěma kontrolními středisky. Operátoři posílali robotům úkoly a planetární vědci vybírali a upřednostňovali cíle na základě dat získaných od robotů. Obě řídicí stanice mise mohly být použity k interakci s kterýmkoli z robotů. Supervizor zajišťoval, aby každý robot v daný okamžik obdržel příkazy pouze od jednoho řídicího střediska, a tím se předešlo konfliktním příkazům, kdy by novější příkaz nahradil ten předchozí. V prezentovaných nasazeních bylo použito jedno řídicí středisko mise pro ovládání Zvěda a Hybrida a druhé řídicí středisko pro ovládání Vědce.
SRC, Lucembursko
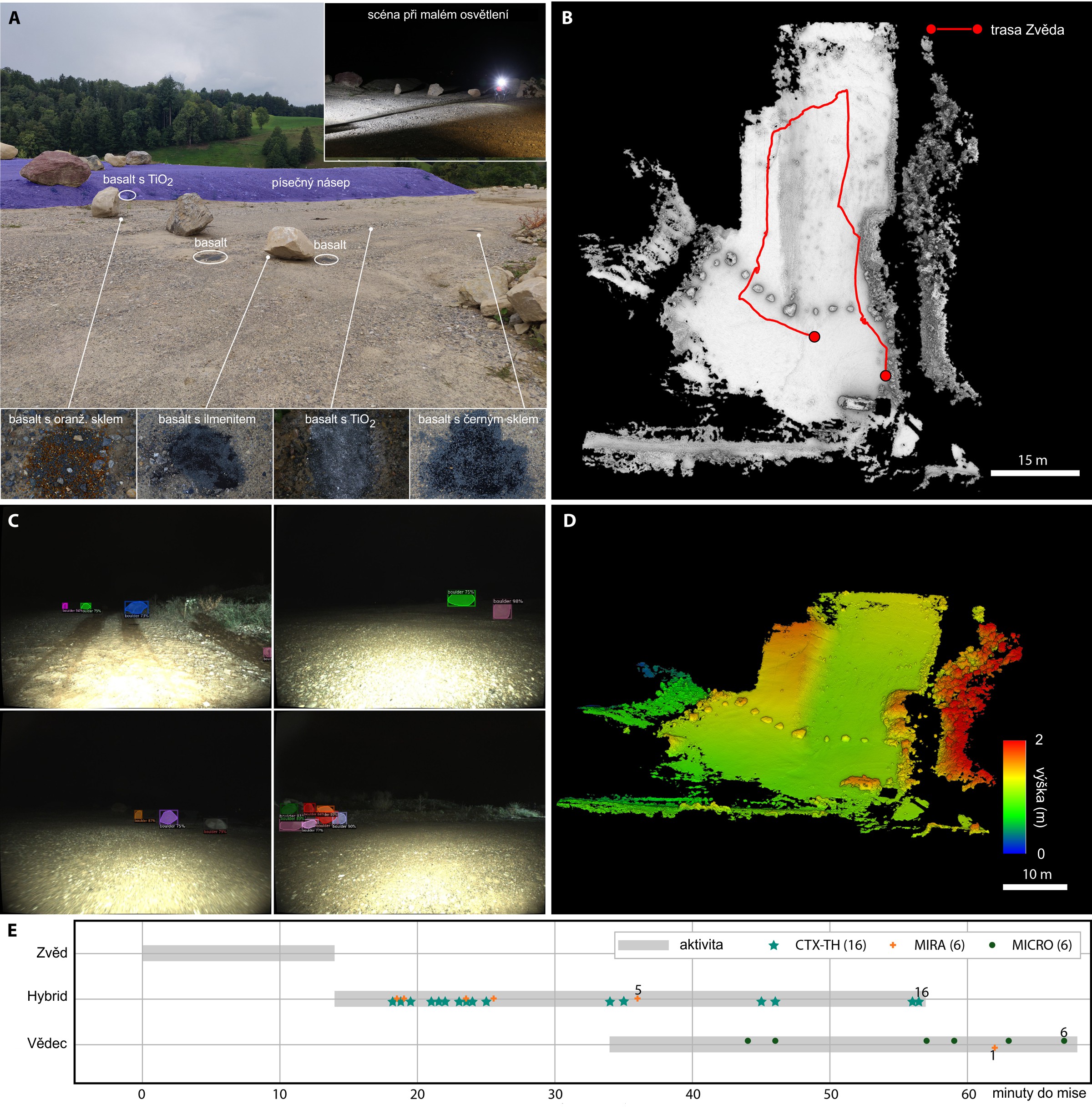
Jedna terénní kampaň proběhla v září 2022 v Esch-sur-Alzette v Lucembursku. Soutěžní plocha připravená v rámci výzvy SRC (ESA/ESRIC Space Resources Challenge) měřila 1 800 m2 a terén byl před touto výzvou neznámý. Půdu pokrýval hrubý zrnitý čedič s podstatnou jemnou frakcí (jíl až bahno). Světelné podmínky se velmi podobaly těm na měsíčním jižním pólu. Oblast byla osvětlena silným zdrojem z rohu oblasti pod velkým úhlem dopadu (viz následující obrázek). Scéna obsahovala několik zajímavých míst, jako jsou naleziště nerostů, balvany, krátery a prototyp lunárního stanoviště. Prodleva v komunikaci mezi řídicí místností a ostatními systémy v soutěžním prostoru byla nastavena na pět sekund.
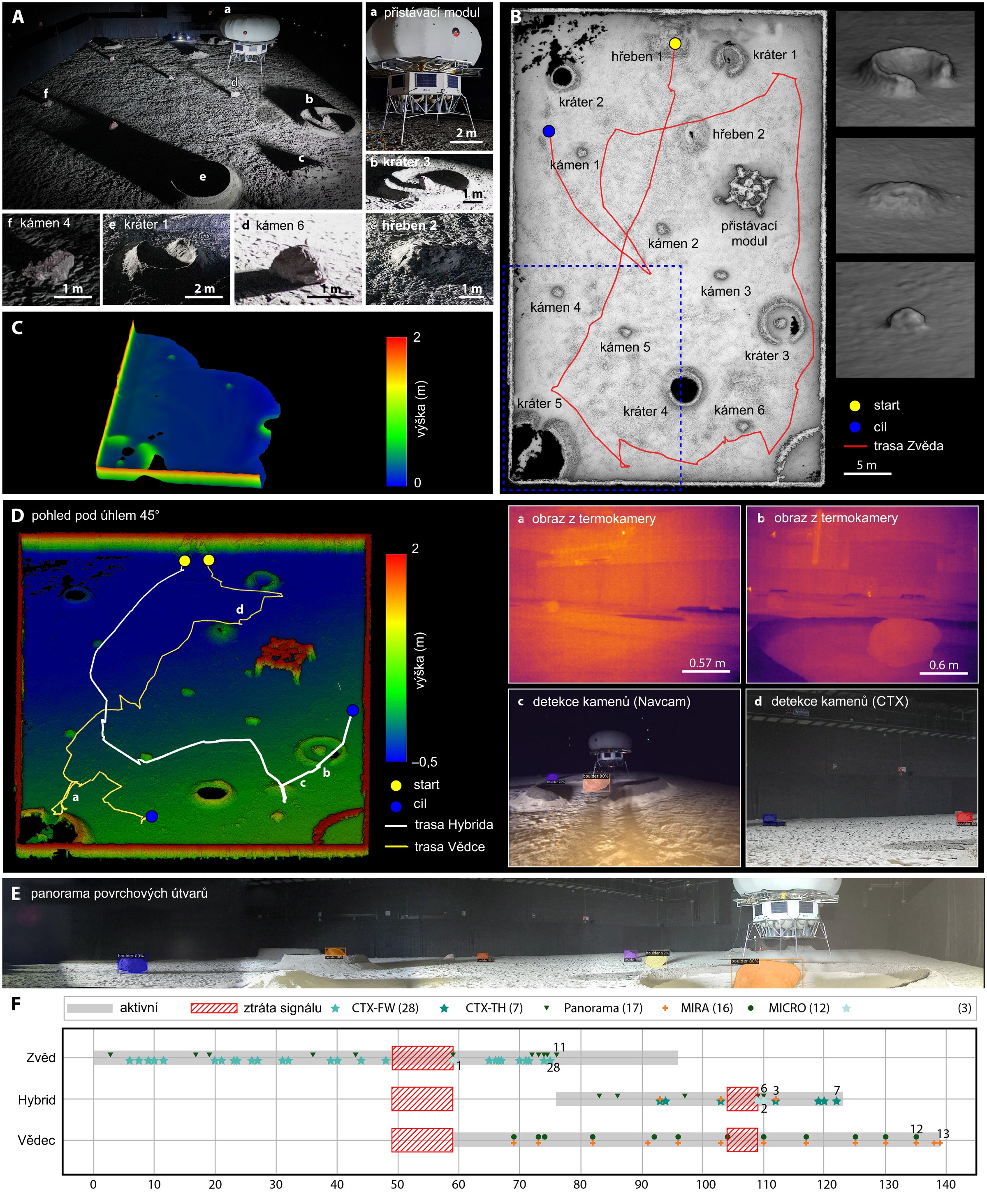
Testování týmu kráčejících robotů během SRC. (A) Přehled soutěžní oblasti. (B) Dodatečně zpracovaná mapa oblasti průzkumu a související cesty Zvěda ve vysokém rozlišení. Oblast v modrém tečkovaném poli odpovídá (C). (C) Online síťová mapa Zvěda pro identifikaci cíle. (D) Dodatečně zpracovaná výšková mapa s vysokým rozlišením a vědecké cesty Hybrida a Vědce. (a, b) Termosnímky získané během SRC. (c) Příklad detekce kamenů ze snímku Navcam. (d) Příklad detekce kamenů ze snímku CTX. (E) Příklad panoramatického snímku s detekcí povrchových útvarů. (F) Souhrn mise SRC. Zdroj: Science Robotics.
Švýcarský lom Neuheim
Areál provozovaný společností KIBAG se sídlem ve švýcarském Neuheimu je aktivní štěrkový lom, který obsahuje špatně vytříděné jemné a hrubé sedimenty, včetně metrových balvanů. Toto je ideální prostředí, které vede k problémům s pohybem, jako je propadání a skluz, zejména na strmých svazích. Součástí areálu je předstěna s maximálním sklonem cca 20°. Simulovaly se i realistické světelné podmínky na lunárním jižním pólu (orientace robota v různých světelných podmínkách jsou vysvětleny v AB 23/2023). Za tímto účelem se test prováděl v noci, aby se minimalizoval vliv přirozeně se vyskytujícího světla. Testovací místo bylo osvětleno pomocí světelné diody (180 W, Aputure LS 120D II) při velkém úhlu osvětlení zhruba 87° (3° nad rovinou terénu). Jak je znázorněno na následujícím obrázku, šikmé osvětlení vedlo k charakteristickým dlouhým, vysoce kontrastním stínům, jaké jsou očekávány v blízkosti měsíčního jižního pólu. Dále veškerá komunikace mezi řízením mise a roboty procházela přes simulátor, který vytvořil časové zpoždění pět sekund. Terén byl dodatečně pokryt balvany obsahujícími čedič, ilmenit, rutil a oxid titaničitý v různých hmotnostních frakcích. Balvany simulovaly realistické zdroje nerostů (REA) při měsíční průzkumné misi.
Výkon týmu kráčejících robotů během mise v lokalitě lomu Neuheim. (A) Experimentální zkušební areál s řadou vědeckých cílů. (B) Dodatečně zpracovaná a stínovaná mapa lokality lomu Neuheim ve vysokém rozlišení s cestou Zvěda. (C) Výsledky segmentace hornin za podmínek nízkého osvětlení. (D) Dodatečně zpracovaná výšková (topografická) mapa s vysokým rozlišením zkušebního lomu Neuheim. (E) Shrnutí mise komplexních nasazení robotů v lomu. Zvěd, Hybrid a Vědec byli rozmístěni postupně s překryvem mise Hybrida a Vědce. Celá mise trvala 68 minut. Zdroj: Science Robotics.
Výsledky lokomoce
V ověřovací testovací kampani ve zkušebním poli mise Beyond Gravity ExoMars mohl Zvěd stoupat a klesat po svazích až 25° (maximum testovacího lože) na ES-4ES-4 – látka vyvinutá Evropskou kosmickou agenturou, která napodobuje povrchovou drť na Marsu. Slouží k testům zařízení pro mise na Mars. a ve skalním podloží. Na obou plochách se provedly celkem tři testy, a to jak ve stoupání, tak v klesání. Testy proběhly bez poruchy lokomoce, za kterou byl považován buď pád, nebo zastavení postupu, například kvůli skluzu. I na maximálním sklonu zkušebního lože dosáhl robot rychlosti až 0,7 m/s, čímž předčil nejmodernější systémy, které dokážou takové sklony vyšplhat. Provedly se i dodatečné testy na svahu se sklonem 10° na ES-4 se stupni skalního podloží a nezpevněnými kopci ve všech směrech. Robot dokázal zdolávat kopce navzdory hlubokému propadávání a plynule přecházel vysoké stupně mezi ES-4 a skalním podložím (viz následující obrázek).

Schopnost lokomoce přizpůsobeného ANYmala v různých náročných planetárních terénech. (A) ANYmal šplhá po strmém písčitém svahu kolem 20° v lokalitě lomu Neuheim. (B) ANYmal unikne z okraje analogového lunárního impaktního kráteru během SRC. (C) ANYmalovo uvolnění nohy zapadlé do měkkého písčitého terénu. (D) ANYmal kráčí přes vysoký skalní schod. Zdroj: Science Robotics.
Nově vyvinutý kontrolér pro Hybrida a Vědce je podobně robustní, jako stávající základní kontrolér (viz AB 49/2020), ale umožní navíc obsluhovat nová přidaná těžká užitečná zatížení, jako je robotická paže. Pohybující se robotická paže nijak nebránila Vědci při chůzi po rovném terénu. Navíc se statickým ramenem spotřeboval robot při simulované misi na rovné zemi o 15 % méně energie při použití nového kontroléru ve srovnání se základním kontrolérem.
Během misí v lomu a v lokalitě SRC roboti překonali strmé zrnité svahy až do 20° a okraj kráteru. Na SRC roboti zdolali celkovou vzdálenost 358 m zrnitým terénem. Vědec nesoucí robotickou paži prokázal stejnou úroveň robustnosti jako Zvěd a Hybrid. Během všech předběžných zkoušek a rozmístění misí se u žádného z robotů nevyskytla jediná porucha lokomoce.
Mapování a identifikace cíle
V obou analogových misích byla využita jen řídká reprezentace sítě pro online operace a hustý mapovací rámec pro postprocesing (viz následující obrázek). Na navigačních kamerách a snímcích CTX byl spuštěn kanál segmentace instancí, který umožnil identifikaci a zvýraznění balvanů jakožto potenciálních cílů zájmu operačního střediska, čímž se podstatně snížila provozní režie.
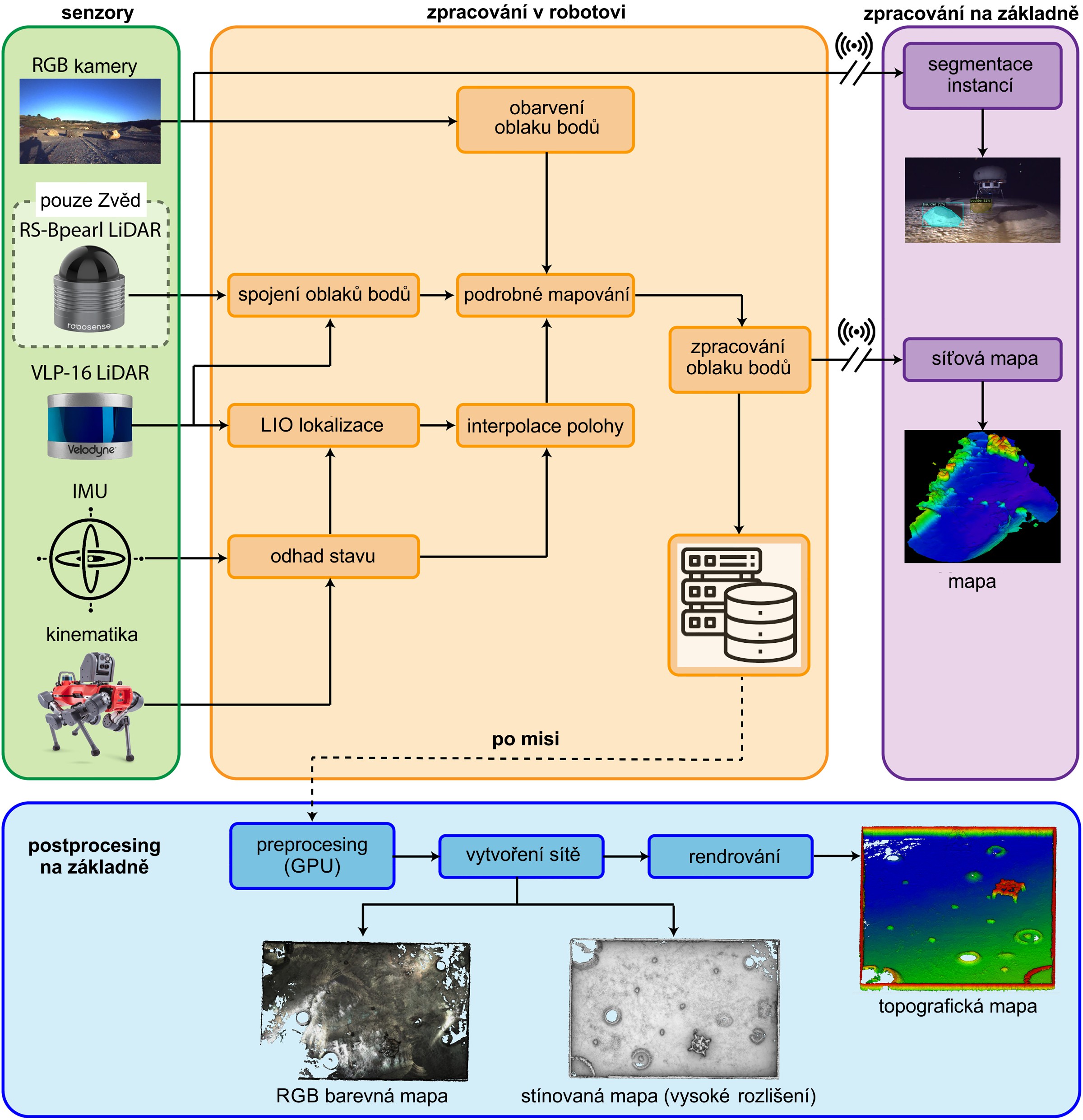
Moduly pro mapování a lokalizaci misí. Modrá oblast
představuje operace po misi,
zatímco ostatní moduly jsou aktivní během mise.
Zdroj: Science Robotics.
Robot poslal navzorkovaný oblak bodů v okruhu devíti metrů kolem sebe do řídicího střediska. Počítač v řídicím středisku vygeneroval síť a automaticky spojil jednotlivé instance sítě, aby postupně vytvořil síťovou mapu pokryté oblasti. Přesunutí síťové operace do počítače umožnilo přenést „řídký“ oblak bodů namísto „husté“ mapy. Rozlišení síťové mapy spolu s navigačními kamerami umožnilo operačnímu středisku identifikovat a označit zájmové cíle pro další vyšetřování. Rozlišení bylo dostatečně vysoké na to, aby se porozumělo prostředí robota, vybraly se cíle na síťové mapě a učinilo se rozhodnutí o plánování mise a přitom proběhl přenos mapy po síti.
Pořízené snímky ukazují, že i za obtížných světelných podmínek může robot pomocí pipeline identifikovat a zvýraznit balvany na snímku, což umožňuje operačnímu středisku identifikaci cíle. Všichni roboti v obou misích udržují mapu oblaku bodů pro vizualizaci s vysokým rozlišením i po misi, kdy nejsou na online síti.
Vědecká data cílů zájmu
Jakmile operační středisko identifikuje a upřednostní cíle zájmu, může posílat úkoly vzdáleného měření a měření in situ všem robotům (viz následující obrázek).
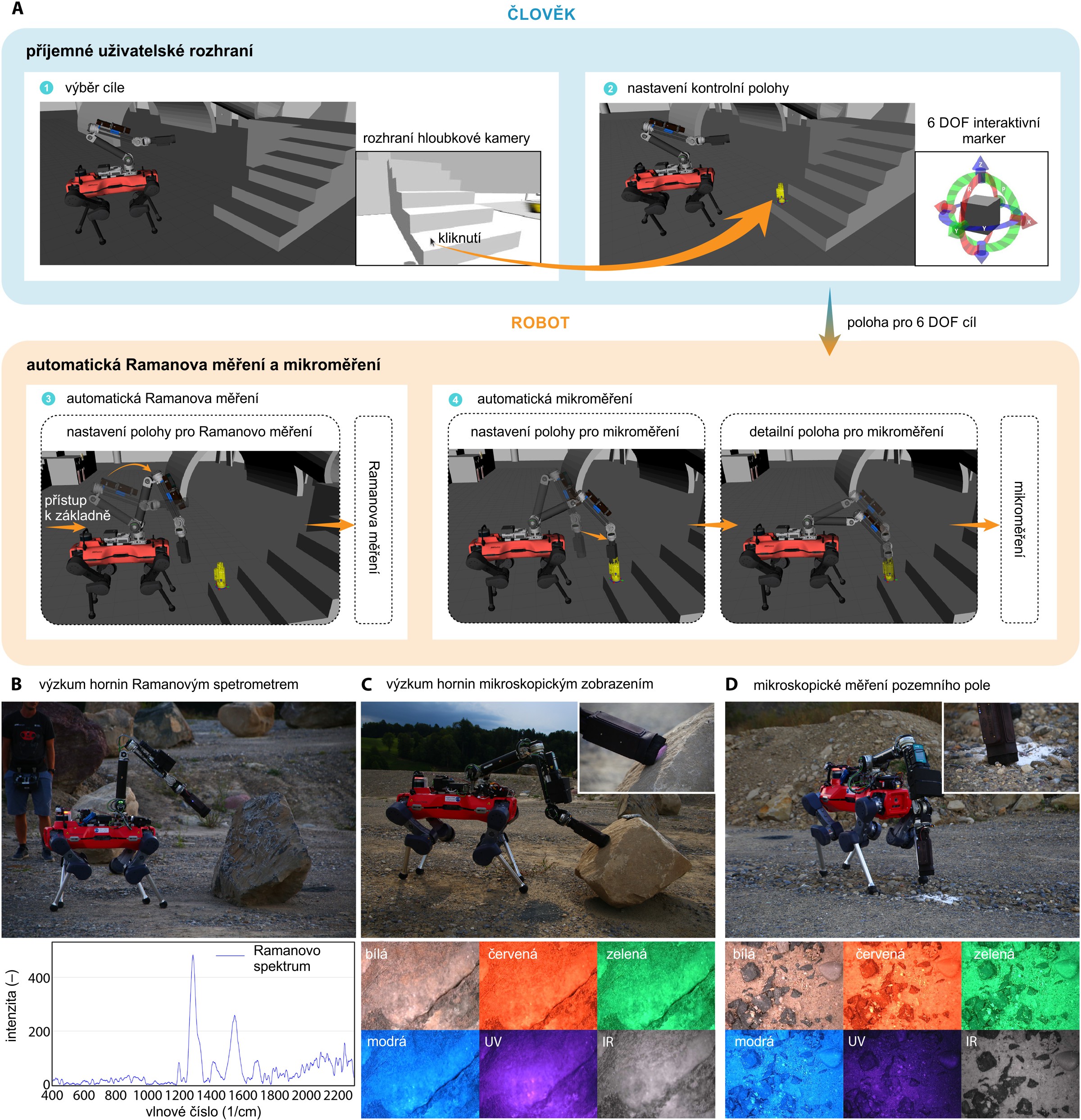
Pracovní postup měření in situ. (A) Operátor vybere požadovaný cíl v zorném poli hloubkové kamery a určí polohu přístroje. Polohu lze upravit pomocí interaktivního nastavení se šesti stupni volnosti. Robot obdrží cíl a na požadovaném místě nasměruje vědecké přístroje. (B) Měření pomocí Ramanova spektrometru MIRA a souvisejících datových produktů. (C) Měření pomocí přístroje MICRO a související datové produkty. (D) Mikroskopické měření pozemního pole a související datové produkty. Zdroj: Science Robotics.
Další obrázek ukazuje příklad vědeckých dat, která byla shromážděna během výzvy SRC. Byly získány snímky v pěti vizuálních spektrálních pásmech při dvou úrovních přiblížení pomocí CTX-FW. Obrázek s malým přiblížením ukazuje velikost, tvar a geomorfii cíle. Snímek s velkým přiblížením poskytuje informace o povrchové struktuře cíle, včetně přítomnosti vezikulVezikuly – v mineralogii bubliny, které vznikly expanzí plynů v tekoucím magmatu a jsou součástí vyvřelých hornin (bazaltů). v milimetrovém až centimetrovém měřítku, litologii horniny a distribuci minerálů. Snímky s malým i velkým přiblížením naznačují, že všechny balvany v SRC byly porézní čediče s afanitickou (jemnozrnnou) texturou. Snímky s vysokým přiblížením pomocí filtrového kola umožnily studovat relativní odrazivost každého cíle a vypočítat pětibodová spektra. Vybrané obrázky RGB byly barevně upraveny pomocí obrázků z barevné kalibrační karty namontované na robotu.
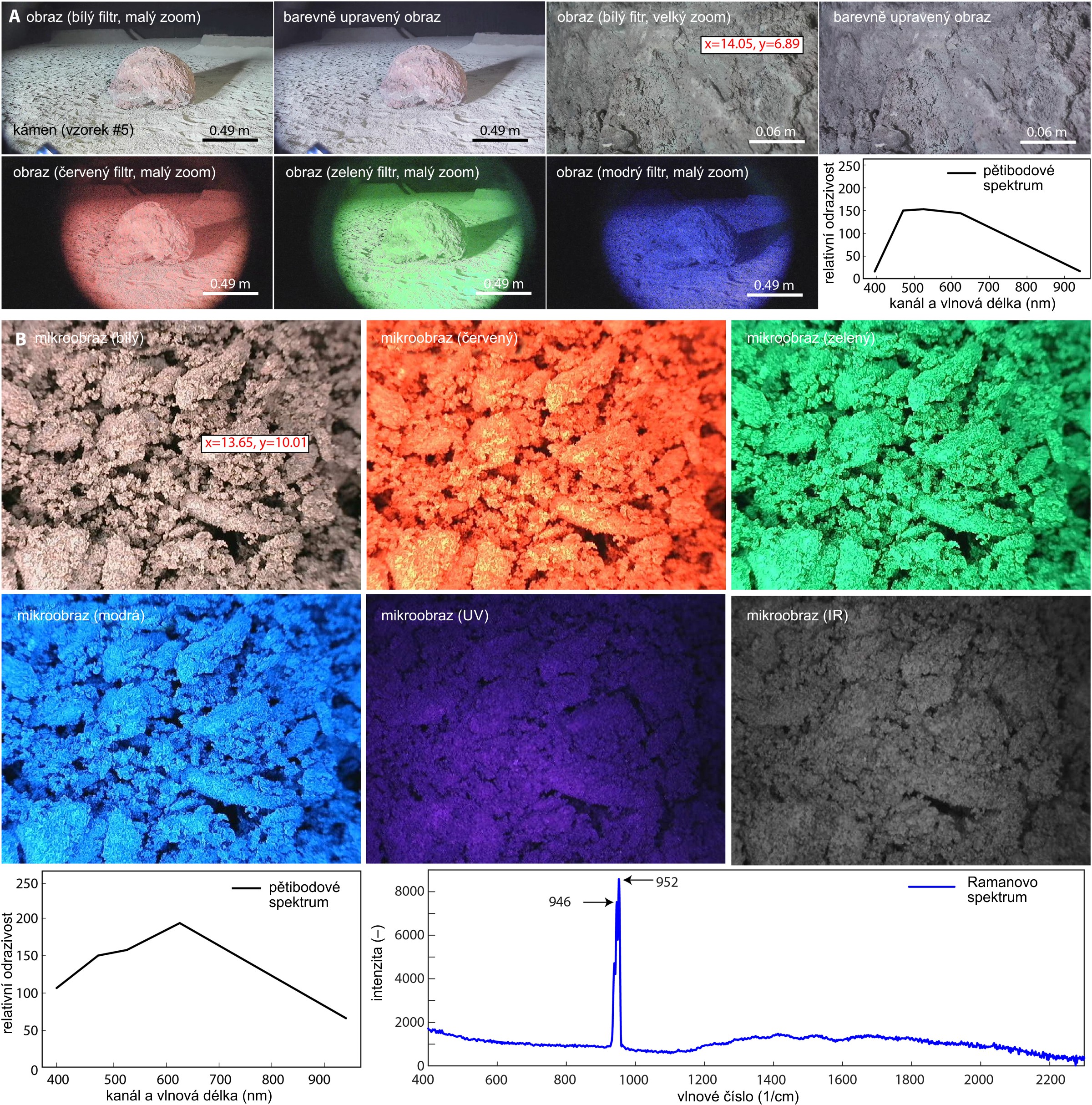
Příklady vědeckých dat ve výzvě SRC. (A) Multispektrální vizuální data získaná pomocí CTX-FW balvanu #5. Na snímcích je vidět vezikulárníVezikuly – v mineralogii bubliny, které vznikly expanzí plynů v tekoucím magmatu a jsou součástí vyvřelých hornin (bazaltů). čedičový balvan. (B) Mikroobrazy a Ramanovo spektrum kandidáta na naleziště nerostů REA. Snímky a spektrum ukazují čedičovou půdu soutěžní oblasti. Relativní odrazivost má libovolnou stupnici. Zdroj: Science Robotics.
Při testech byly shromážděny mikroskopické snímky v šesti různých spektrálních pásmech: bílé barvě, červené, zelené, modré, v ultrafialovém (UV) a infračerveném (IR) oboru, což umožňilo vypočítat pětibodové spektrum cíle. Na snímcích je vidět hrubozrnný čedičový regolit, který pokryl celou soutěžní plochu v SRC. Mikrosnímky umožnily prozkoumat statistické zastoupení velikosti zrn a přítomnost potenciálních zdrojů. Ramanovo spektrum čedičového regolitu ukazuje například výrazný pík při vlnovém čísle 952 cm−1.
Závěr
Využtí týmu kráčejících robotů s výkonnými schopnostmi lokomoce, mapovacího pipeline pro online a postmisní vizualizaci a segmentačních nástrojů pro identifikaci cíle umožnilo shromáždit značné množství vědeckých dat v simulovaných planetárních misích s časovým omezením. Specializace robotů umožnila vysoké využití užitečného zatížení, jak bylo prokázáno na SRC, kde robot Vědec využíval přístroje MIRA a MICRO každých 3 až 5 minut. Pokud by se nevyužilo dalších robotů bez určité specializace (například kdyby v týmu chyběl specializovaný průzkumný robot), tak by každý robot investoval podstatnou část svého času do mapování a identifikace cíle, což by značně omezovalo využití jeho užitečného zatížení.
Prostředí lomu ukázalo důležitost konceptu redundance. I přes dvě nefunkční užitečné zátěže lze stále splnit šest ze sedmi cílů mise. I když při nasazení nebylo zaznamenáno žádné selhání robota, navržený koncept redundance by stále umožňoval splnit většinu cílů. Jedno poučení z reálného nasazení v terénu je, že komunikace s prodlevou pěti sekund mezi řídicím střediskem a robotem výrazně ovlivnila operace. Standardní spolehlivé protokoly, jako je TCP (Transmission Control Protocol), nejsou v tomto případě vhodné. Při použití protokolu UDP (User Datagram Protocol) se musela snížit velikost přenášených dat z oblaků bodů a obrázků, aby se při přenosu dat snížila pravděpodobnost ztráty byť jen jediného paketu.
Klíčovým zjištěním při těchto nasazeních byl i vliv lidského aspektu. Roboti mohli provádět jednotlivé úkoly autonomně, ale lidští operátoři museli stále určovat priority a přidělovat úkoly. Toto rozhodování může být časově náročné a obtížné, zejména proto, že operátoři musí vyvážit čas potřebný pro rozhodovací proces s časem mise. Algoritmický přístup k rozhodování a přidělování úkolů by mohl zlepšit návratnost mise. Algoritmus by mohl pomoci operačnímu středisku, nebo by v ideálním případě mohl být implementován v autonomním modulu na robotech, aby umožnil dlouhodobější nebo dokonce úplnou autonomii mise. Je však zapotřebí, aby roboti komunikovali více mezi sebou a bylo možné vytvářet mapy pro spolupráci, přidělovat jim úkoly ve smyčce bez řídicího střediska a umožnit větší míru interakce a spolupráce mezi dalšími redundantními roboty.
Vyšší úroveň autonomie navíc zlepšuje škálovatelnost systému na aplikace s ještě náročnější komunikací, jako je průzkum Marsu. Navíc umožní škálování přístupu na vyšší počet robotů, aniž by se zvyšovalo zatížení provozního střediska. Pro zvýšení úrovně autonomie je nutná automatická identifikace a stanovení priorit, automatické přidělování úkolů robotům na základě specifického souboru dovedností robota a bezpečný plánovač s více cíli, který zajistí návštěvu identifikovaných cílů.
Tento bulletin se zabýval týmem kráčejících robotů s různými vědeckými vyšetřovacími schopnostmi, ale i s téměř identickými lokomočními dovednostmi. V budoucích nasazeních by mohl být výhodnější heterogenní přístup, tedy kombinace robotů nohy/kola nebo země/vzduch. Tým s drony by umožnil rychlé mapování terénu. Tým robotů na kolech (sice s omezenou pohyblivostí, ale s delší výdrží baterie) by mohl zkoumat snadno dosažitelné cíle, zatímco kráčející roboti by se zaměřovali na těžko přístupná místa.
* * *
„Dobře vybudovaný tým může dosáhnout takového úspěchu, o kterém jste nikdy ani nesnili.“
John C. Maxwell
Odkazy
- Philip Arm et al.: Scientific exploration of challenging planetary analog environments with a team of legged robots; Science Robotics 8/80, 12 Jul 2023
- ETH Zurich: Planetary analog environments explored by a team of legged robots; TechXplore, 13 Jul 2023
- Petr Panchártek: Čtyřnohý ANYmal na obchůzce; AB 49/2020
- Petr Panchártek: Robot bez Alzheimera; AB 23/2023
- KAMERAK.cz: Co je PTZ P2P kamera?
- Katalon: What is End-to-End Testing?
- Wikipedie: In situ
- Wikipedie: Měsíční moře
- Wikipedie: Pyroklastický proud
- Wikipedie: Regolit
- Youtube: Scientific Exploration of Challenging Planetary Analog Environments with a Team of Legged Robots
![]()
![]()
