|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Je to pták? Letadlo? Ne, je to LEO!
Petr Panchártek
Myšlenka robota, který dokáže chodit po provaze, jezdit na skateboardu a létat, by mohla znít jako koncept sci-fi. Takový robot ale opravdu existuje, jmenuje se LEONARDO (LEgs ONboARD drOne). Jde o dvounohého robota, který je, podobně jako drony, vybaven stabilizačními vrtulemi. LEO byl postaven z částí robotů a dronů, které sestavili inženýři v laboratoři Kalifornského technologického institutuCALTECH – California Institute of Technology, prestižní americká univerzita, která vznikla v roce 1921. Založil ji chemik Arthur A. Noyes spolu s významným fyzikem Robertem A. Millikanem. Předchůdcem byla Throopova univerzita z roku 1891. Univerzita sídlí v kalifornské Pasadeně. Univerzita zajišťuje provoz JPL (Jet Propulsion Laboratory) americké NASA, analyzuje data ze Spizerova vesmírného dalekohledu a spravuje hanfordskou část detektoru gravitačních vln LIGO. v Pasadeně. Kromě zlepšení stability při chůzi po laně umožňují vrtule asi 80 cm vysokému robotovi vznést se do vzduchu a létat. Tým říká, že LEO by jednoho dne mohl uplatnit své schopnosti země/vzduch u robotických misí, které jsou v současné době obtížné pro pozemní nebo vzdušné roboty či drony. Kromě balancování a skateboardingu by mohl být robot jednoho dne použit k provádění úkolů, které jsou v současné době pro drony, roboty nebo lidi velmi obtížné, včetně provozu v nebezpečných a těžko dostupných prostředích.
Leonardo, krátce známý jako LEO, byl postaven z částí robotů a dronů v
laboratoři
inženýry z Kalifornského technologického institutu v
Pasadeně. Zdroj: Caltech.
|
Slackline – chození a skákání na popruhu upevněném mezi dvěma body, například stromy. Název je z anglických slov „slack“ (balancování) a „line“ (linie). Na rozdíl od chození po provazu není popruh natažený napevno, ale je více, nebo méně pružný. Počátky této nové zábavy/sportu lze vystopovat do Yosemitského národního parku, kde si lezci krátili volnou chvíli chozením po řetězech u místních parkovišť. Lokomoce – přemísťování objektů, živočichů či člověka z místa na místo. Pohyb probíhá buď prouděním protoplazmy (například u měňavky), nebo stahy svalů u větších živočichů. Podle prostředí, v němž se pohyb provádí, se rozlišuje například chůze (běh), plavání nebo let. Lokomoce robotů vychází často ze vzorů z živočišné říše. CALTECH – California Institute of Technology, prestižní americká univerzita, která vznikla v roce 1921. Založil ji chemik Arthur A. Noyes spolu s významným fyzikem Robertem A. Millikanem. Předchůdcem byla Throopova univerzita z roku 1891. Univerzita sídlí v kalifornské Pasadeně. Univerzita zajišťuje provoz JPL (Jet Propulsion Laboratory) americké NASA, analyzuje data ze Spizerova vesmírného dalekohledu a spravuje hanfordskou část detektoru gravitačních vln LIGO. |
Pozemní a vzdušní roboti – klady a zápory
Pozemní roboti
Během několika posledních desetiletí bylo studováno a vyvinuto mnoho pozemních robotů v různých podobách. Jejich hlavní pohyb je založen na chůzi, valení a plazení. Dvounozí roboti přitahují největší pozornost díky svému tvaru těla podobnému lidskému a všestrannému pohybu. Bezpečné mobilitě pozemních robotů brání nepříznivé pozemní podmínky a existence různě velkých překážek. To omezuje jejich praktické aplikace na různě strukturovaná prostředí, jako tomu je u vnitřních servisních robotů nebo robotických vysavačů.

Příkladem pozemního robota je humanoidní stopařka Matylda,
která stopovala z Jab-
lonce nad Nisou přes Pardubice a Plzeň až do
Pelhřimova. Zdroj: Aktualne.cz
Vzdušní roboti
Výše uvedené potíže u pozemních robotů lze překonat pomocí vzdušných robotů, kteří létají přes překážky jakékoli velikosti nebo v terénu za jakýchkoli podmínek. Takoví roboti byli další hlavní oblastí výzkumu v robotické komunitě. Letadla s pevným křídlem či vrtulemi a jejich hybridní typy byly rozsáhle studovány a jsou navrženy pro aplikace v reálném světě. Mezi ně patří dálkový průzkum Země, doručování, vyhledávání a záchrana, sledování a monitorování v reálném čase.
Tito roboti však mají své nevýhody, včetně velké spotřeby energie, krátké doby letu a provozu. Mají omezené palubní zdroje a malou hmotnost užitečného zatížení. Kromě toho mají vzdušní roboti větší potíže než pozemní roboti při fyzické interakci se svým prostředím nebo s jinými roboty, protože ve vzduchu potřebují být stabilní. Vzdušní roboti byli navrženi především pro aplikace, které nezahrnují fyzické interakce nebo jen minimálně, jako jsou vizuální kontroly. V poslední době se ale stala oblíbeným tématem výzkumu i letecká manipulace. S pomocí hybridního pohybu, který je někde mezi chůzí a létáním, by se mohlo vytěžit to nejlepší z obou světů, pokud jde o lokomociLokomoce – přemísťování objektů, živočichů či člověka z místa na místo. Pohyb probíhá buď prouděním protoplazmy (například u měňavky), nebo stahy svalů u větších živočichů. Podle prostředí, v němž se pohyb provádí, se rozlišuje například chůze (běh), plavání nebo let. Lokomoce robotů vychází často ze vzorů z živočišné říše..

Příkladem vzdušného robota je dron Mavic. Nabízí neuvěřitelné
možnosti zoomování. Zdroj: FlyRobotics.
Jak se LEO pohybuje?
LEONARDO je asi 80 cm vysoký robot s hmotností 2,5 kg. Je vybaven dvěma nohama, které mají tři ovládané klouby spolu se čtyřmi vrtulemi šikmo namontovanými na ramenou robota. Byl inspirován mnoha druhy ptáků a hmyzu, kteří jsou schopni plynule měnit styl pohybu mezi chůzí, létáním nebo dokonce plazením se po zemi. Pohybuje se rychlostí asi 20 cm za sekundu, ale tu lze zvýšit přerušovaným létáním. Pomocí přerušovaného létání v blízkosti země může letět rychlostí 3 až 5 m/s. Inspirace byla čerpána z přírody. Přemýšlelo se o tom, jak jsou ptáci schopni mávat a skákat při chůzi po telefonními vedením. Když ptáci přecházejí mezi chůzí a létáním, dochází ke složitému, ale zajímavému chování. Existuje podobnost mezi tím, jak člověk v nasazeném obleku s tryskami ovládá své nohy a chodidla při přistání nebo vzletu, a jak LEO synchronizovaně ovládá rozmístěné vrtule a klouby nohou.
Studovalo se také rozhraní chůze a létání z hlediska dynamiky a řízení. Nejvhodnějšími aplikacemi pro LEA by byly ty, které zahrnují fyzické interakce se strukturami ve velké výšce. Činnosti, jako je inspekce vysokonapěťového vedení nebo oprava částí vesmírné stanice, jsou obvykle pro lidské pracovníky velmi nebezpečné a vyžadují několik typů pozemních a vzdušných robotů, ale LEO by mohl tento úkol provést sám.

LEO je profesionální slackliner, je to kříženec mezi dronem a
robotem, který dokáže
pomocí nohou překročit tenký drát, než ladně doletí
zpět na zem. Zdroj: News wwc.

LEO byl inspirován mnoha druhy ptáků a hmyzu, kteří jsou
schopni plynule měnit styl
pohybu mezi chůzí, létáním, nebo dokonce plazením
se po zemi. Zdroj: News wwc.
Chůze po provaze není problémem
Dvounozí roboti se vypořádávají s různými terény skutečného světa pomocí stejného pohybu jako lidé, včetně skákání, běhání a lezení. Často je však brzdí zvláště nerovný terén, pro který se lépe využívají vzdušní roboti, kteří se překážkám úplně vyhnou. Navzdory svým výhodám mají vzdušní roboti své vlastní problémy, včetně obzvláště vysoké spotřeby energie a omezení na hmotnost nákladu.
Roboti se schopností multimodální (hybridní) lokomoceLokomoce – přemísťování objektů, živočichů či člověka z místa na místo. Pohyb probíhá buď prouděním protoplazmy (například u měňavky), nebo stahy svalů u větších živočichů. Podle prostředí, v němž se pohyb provádí, se rozlišuje například chůze (běh), plavání nebo let. Lokomoce robotů vychází často ze vzorů z živočišné říše. se dokážou pohybovat náročnými prostředími efektivněji než tradiční roboti, a to vhodným přepínáním mezi dostupnými prostředky pohybu. Zejména LEO se snaží překlenout propast mezi dvěma nesourodými doménami vzdušné a dvounohé lokomoce, které nejsou typicky propojeny ve stávajících robotických systémech.
Roboti se schopností multimodální lokomoce se dokážou pohybovat náročnými prostředími efektivněji než tradiční roboti, protože vhodně přepínají mezi dostupnými prostředky pohybu. Zdroj: SciRobotics.
Protože jsou vrtule ovládány synchronně s klouby nohou, má LEO neskutečnou rovnováhu. Na základě typů překážek, které potřebuje překonat, si LEO může vybrat, zda použije chůzi nebo létání, nebo je podle potřeby kombinovat. Kromě toho je LEO schopen provádět neobvyklé lokomoční manévry, které i u lidí vyžadují zvládnutí rovnováhy, jako je balancování na laně a skateboarding. LEO je vybaven dvěma nohama, které mají tři ovládané klouby, spolu se čtyřmi vrtulemi namontovanými na ramenou robota.
Jak se člověk pohybuje, upravuje polohu a orientaci svých nohou tak, aby se jeho těžiště pohybovalo dopředu, zatímco je zachována rovnováha těla. LEO chodí tímto způsobem také, protože vrtule zajišťují, že robot je při chůzi vzpřímený. Synchronizované ovládání vrtulí a nohou mění polohu tak, aby posunuly těžiště robota dopředu při chůzi a létání. Robot pro létání používá vrtule a zcela během letu ignoruje nohy a chová se jako dron.
Dvounohý chodící robot, který umí chodit, létat, balancovat a
jezdit na skateboardu.
Zdroj SciNews
Co dál?
Skupina vědců, která vyvinula LEA, plánuje vyztužit nohy a zvýšit sílu vrtulí. Tím se výkon LEA zlepší, bude schopen unést vlastní tělo i případný náklad. LEO se zlepší v autonomii, aby pochopil, jak velkou část své hmotnosti nesou jeho nohy a jak měnit polohu vrtulí při chůzi po nerovném terénu. Dále se plánuje vybavit LEA nově vyvinutým algoritmem pro řízení přistávání dronů, který využívá hluboké neuronové sítě. S lepším pochopením prostředí by LEO mohl sám rozhodnout o nejlepší kombinaci chůze a letu nebo hybridního pohybu, které by měl používat k přesunu z jednoho místa na druhé na základě toho, co je nejbezpečnější a co spotřebuje nejméně energie.
Tělo LEA obsahuje baterie, senzory a dostatečný výpočetní výkon potřebný pro plně autonomní provoz, jen potřebuje větší schopnost samostatného rozhodování. LEO momentálně používá vrtule k udržení rovnováhy při chůzi, což znamená, že spotřebovává zbytečně moc energie, a to je poměrně neefektivní.

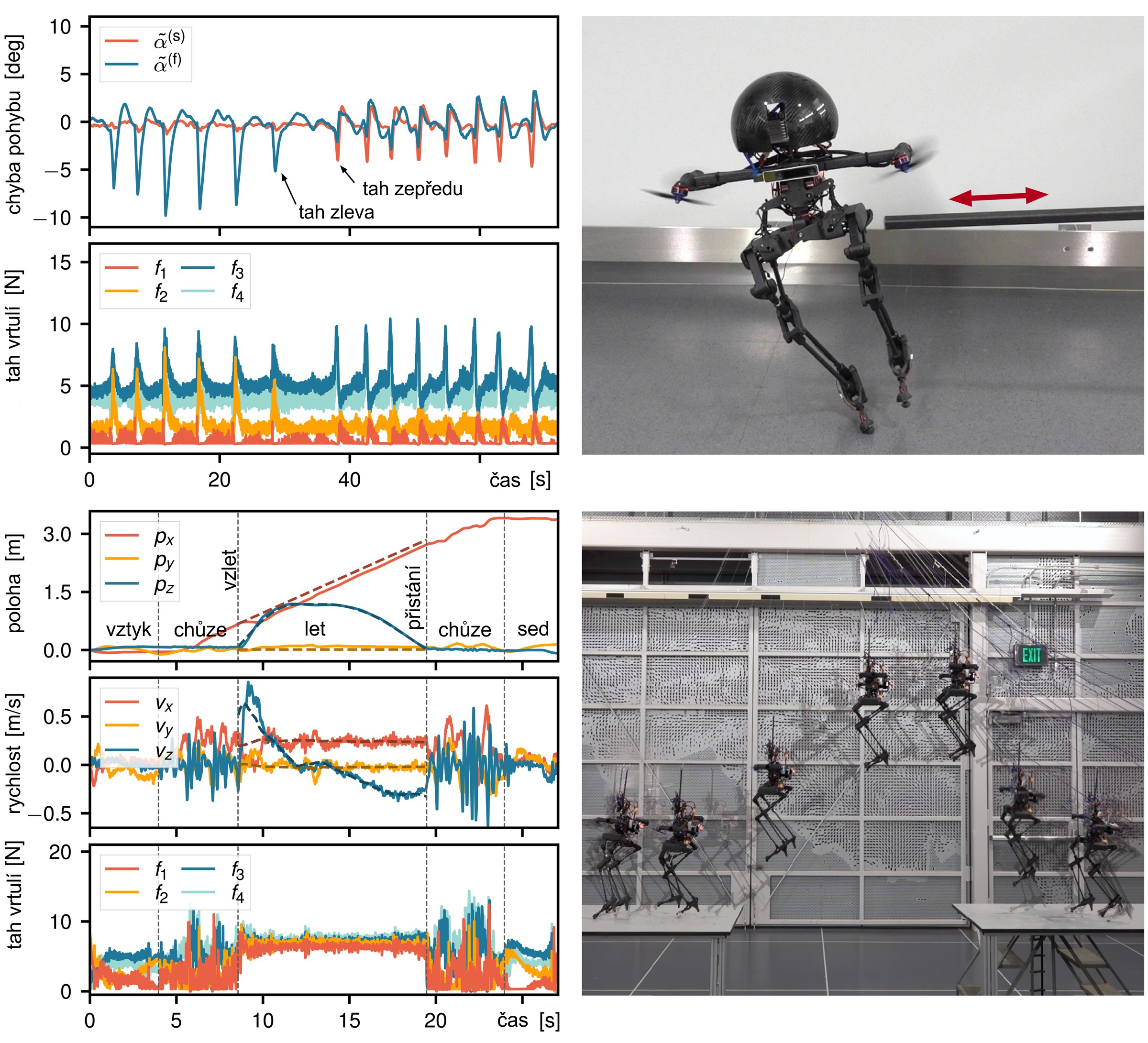
LEONARDO balancuje v umělém větru. Jednoho dne mohl uplatnit své schopnosti země/vzduch na robotické mise, které jsou pro pozemní nebo vzdušné roboty v současnosti velmi obtížné. Zdroj: Caltech.
Skupina z Caltechu plánuje vylepšit konstrukci nohou, aby LEO při chůzi a balancování využíval vrtule minimálně. V reálném světě by technologie navržená pro LEA mohla podpořit vývoj adaptivních podvozkových systémů složených z nohou a řízených kloubů pro letecké roboty a další typy létajících vozidel. Budoucí letadla s překlopnými rotory by na Marsu mohla být vybavena podvozkem s nohami a klouby, aby bylo možné udržet rovnováhu těla těchto vzdušných robotů při přistávání na svažitém nebo nerovném terénu. To by snížilo riziko selhání za náročných podmínek přistání.
Odkazy
- Stefano Mintchev: A professional slackliner robot; Science Robotics, 6 Oct 2021
- Helen: Meet LEO, the professional slackliner robot built to act like a drone-bot hybrid; News WWC, 7 Oct 2021
- Abdullah: LEO The robot can float and balance on a beam like a butterfly; Timez Magazine, 12 Oct 2021
- Wikipedie: Slackline
- Veritasium: This Robot Walks, Flies, Skateboards, Slacklines; YouTube, 16 Oct 2021
- Caltech: Leonardo: The Skateboarding, Slacklining Robot; YouTube, 6 Oct 2021
- SciNews: LEONARDO - a bipedal walking robot that can fly; YouTube, 7 Oct 2021
- Zuzana Hronová: Čech vyšle na cestu humanoidní stopařku Matyldu; Aktualne.cz, 8. 10. 2018
- FlyRobotics: Top 5 Drones for Photography
![]()
![]()
