|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
To neznáte robotí hadí mršku
Petr Panchártek
Díky pokroku v technice již existují roboti zkoumající souš, moře, oblohu i vesmír. Jedno prostředí je pro jejich navigaci zatím obtížné, a tím je podzemí. Tým inženýrů z Kalifornské univerzity v Santa Barbaře (UCSBUCSB – University of California, Santa Barbara, Kalifornská univerzita v Santa Barbaře. Část Kalifornské univerzity, jejíž kořeny sahají do roku 1891. Univerzita v Santa Barbaře má tři bakalářské koleje, dvě magisterské fakulty a deset národních výzkumných center (nejznámější je Kavliho institut teoretické fyziky). Z UCSB pochází šest nositelů Nobelovy ceny.) a z Institutu technologií v Georgii nalezl způsob, jak zkoumat zrnité podzemní prostory. Inženýři vyvinuli hadovitého robota, který využívá celou řadu metod k prohrabání se měkkým pískem nebo půdou.
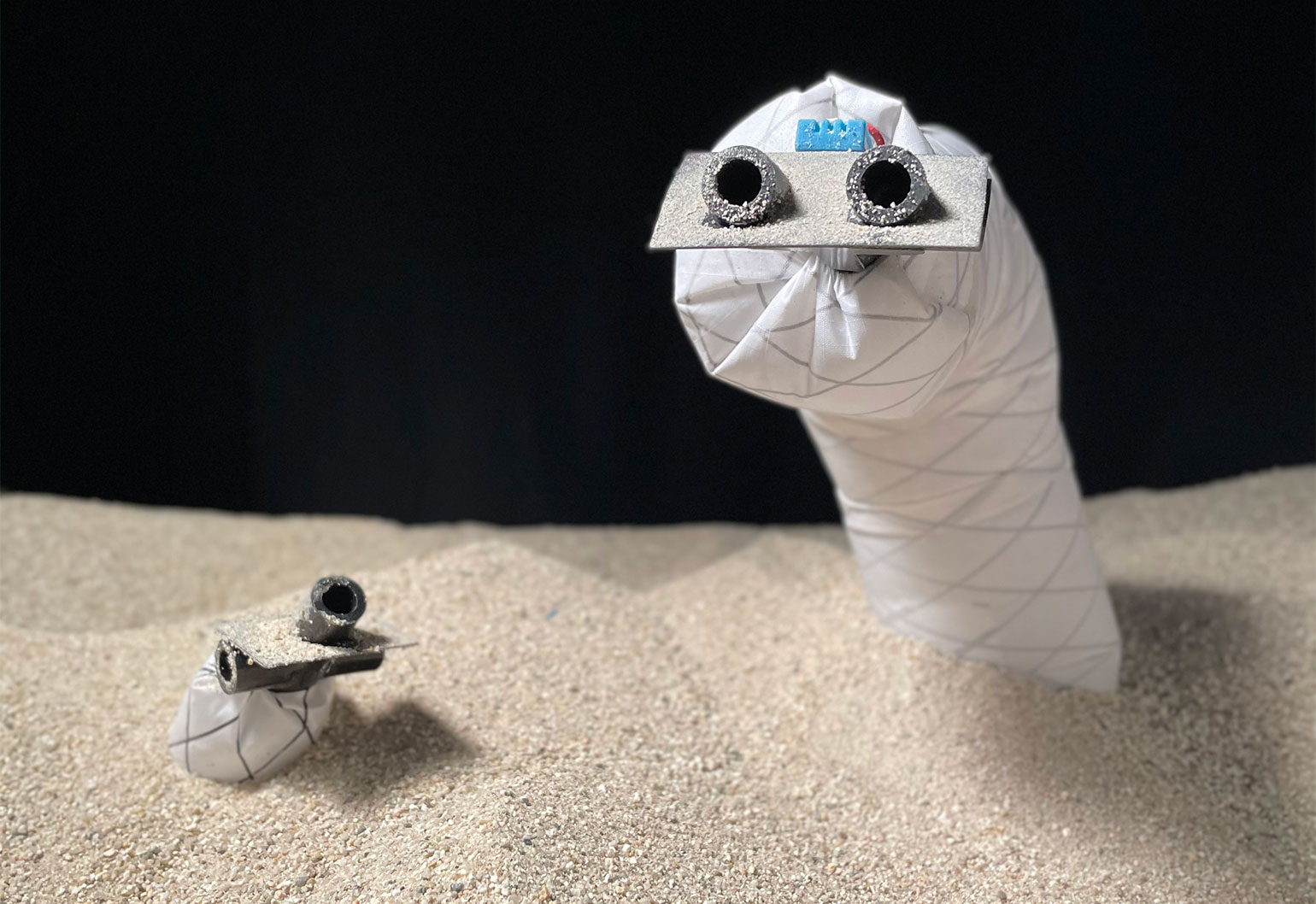
Nový robot na hrabání v písku má v přední části vzduchové trysky,
které odfukují
písek z cesty, a klínovitou hlavu, která mu pomáhá v pohybu.
Zdroj: UCSB.
|
Fluidizace – proces obdobný zkapalnění pevné či plynné látky. Zrnitý materiál je převeden z pevného statického stavu do dynamického stavu podobného tekutině. K tomu se využívá průchodu plynu či kapaliny zrnitým prostředím směrem vzhůru proti gravitaci. Zrnka se pak vznášejí a chovají se jako tekutina. Ripstop – prošívaná tkanina s vysokou pevností vyrobená tak, že do běžné textilie jsou ve dvou směrech vetkány s odstupem pěti až osmi milimetrů tlustší nitě. Tkanina tak získá členitou strukturu a je mimořádně odolná proti roztržení. Technika se využívá například pro výrobu padáků. Název je odvozen z anglických slov „rip“ (roztržení) a „stop“. UCSB – University of California, Santa Barbara, Kalifornská univerzita v Santa Barbaře. Část Kalifornské univerzity, jejíž kořeny sahají do roku 1891. Univerzita v Santa Barbaře má tři bakalářské koleje, dvě magisterské fakulty a deset národních výzkumných center (nejznámější je Kavliho institut teoretické fyziky). Z UCSB pochází šest nositelů Nobelovy ceny. |
Pozemní hadí roboti
Pokud robot hledá oběti na místě katastrofy, nebo dokonce zkoumá jinou planetu, pak je určitě žádoucí, aby neuvízl v písku. Proto vědci studovali jednoho z nejlepších cestovatelů po písku v živočišné říši, a to chřestýše. Chřestíš je široce známý svou schopností rychle se vlnit a bočním pohybem se v písku přesouvat. Poté, co analyzovali jeho pohybové vzorce a aplikovali je na stávajícího robota inspirovaného hadem, byl tento robot schopen vylézt i do písečných svahů.
Vědci z pittsburské Univerzity Carnegieho–Mellonových, z Institutu technologií v Georgii a ze Státní univerzity v Oregonu se začali nedávno zajímat o boční pohyb chřestýšů, který chtěli využít pro pohyb robotů. Začali tím, že v atlantské zoologické zahradě zřídili šikmý výběh naplněný pískem. Poté dostali k dispozici šest chřestýšů, které nechali lézt do takto uměle vytvořeného svahu. Pořídili vysokorychlostní video plazů v akci a díky jeho analýze se jemnosti jejich pohybů staly snáze rozpoznatelné.

Hadí robot z Univerzity Carnegieho–Mellonových dokáže
vystoupat i na písečné svahy. Zdroj: CMU.
Ze záznamu vyplynulo, že se boční pohyb těla hada, který umožňuje lezení, skládá ze dvou nezávisle ovládaných vln. Díky neustálému nastavování poměru těchto vln (svisle i vodorovně) mohou ovládat, jaké části jejich těla jsou v kontaktu s pískem. Čím strmější je svah, tím větší je celková kontaktní plocha. Když byl obdobný pohybový vzorec naprogramován do pohybů robota, byl schopen lézt po svazích, které by dříve nebylo možné zvládnout. Takový typ robota je často označován jako „biologicky inspirovaný“, ale inspirace příliš často nepřesahuje běžné pozorování biologického systému. Od první studie uplynulo několik let a vědci začali jít mnohem hlouběji, doslova myšleno hlouběji pod zem.
Hadí robot naprogramovaný dle vzorců typického chování chřestýše. Zdroj: CMU.
Jak to chodí v podsvětí?
Tým inženýrů z UCSBUCSB – University of California, Santa Barbara, Kalifornská univerzita v Santa Barbaře. Část Kalifornské univerzity, jejíž kořeny sahají do roku 1891. Univerzita v Santa Barbaře má tři bakalářské koleje, dvě magisterské fakulty a deset národních výzkumných center (nejznámější je Kavliho institut teoretické fyziky). Z UCSB pochází šest nositelů Nobelovy ceny. vyvinul hrabajícího robota inspirovaného přírodním světem, který překonává omezení konvenční robotiky. Nároky na síly používané pro podzemní pohyb jsou řádově vyšší než ve vzduchu nebo ve vodě. Člověk například nemůže kopat díru tak rychle, jako může plavat, nebo dokonce běžet. Proto většina způsobů kopání vyžaduje těžké a výkonné stroje, jako jsou vrtná či razicí zařízení. I když jsou tyto nástroje účinné, mají omezenou schopnost měnit v podzemí směr a nemusí být pro malého průzkumného robota nejpraktičtější. Dalším problémem vodorovného hrabání je, že na objekt pohybující se vodorovně zrnitým terénem působí vztlaková síla. Na rozdíl od plynu nebo kapaliny, které mohou snadno proudit kolem předmětu, dochází při vodorovném pohybu hrabajícího se objektu k jeho postupnému „vyplouvání“ na povrch.

Testování hadího robota ve skleněném boxu naplněný pískem. Zdroj: UCSB.
Jak to funguje?
Samotný robot využívá překvapivě jednoduchou technologii. Jeho tělo je vyrobeno ze vzduchotěsné prošívané nylonové tkaniny (tzv. ripstop látkaRipstop – prošívaná tkanina s vysokou pevností vyrobená tak, že do běžné textilie jsou ve dvou směrech vetkány s odstupem pěti až osmi milimetrů tlustší nitě. Tkanina tak získá členitou strukturu a je mimořádně odolná proti roztržení. Technika se využívá například pro výrobu padáků. Název je odvozen z anglických slov „rip“ (roztržení) a „stop“.). Nylonová trubice dodává vzduch k přední části robota, který odfukuje částice před sebou, aby uvolnil cestu, jak se pohybuje pod povrchem. Oplet z uhlíkových vláken dodává torzní tuhost, zatímco teflonový plášť snižuje tření. Robot je pneumaticky poháněn stlačeným vzduchem nebo dusíkem, který mu umožňuje pohyb pod povrchem.
Robot je přímo inspirován kořeny rostlin, které rostou od vrcholů a zasahují hluboko do půdy. Robot vyčnívá v přední části, zabraňuje bočnímu tření a může se otáčet jakýmkoli směrem. Dělá to tak, že se sám převrátí a vysune v přední části nový materiál. To znamená, že strany robota zůstávají vzhledem ke svému okolí nehybné. Bez ohledu na to, jak je robot dlouhý nebo jaká je jeho dráha, potřebuje pouze překonat odporové síly na své přední části a nikoli je překonávat na bocích. Vědci vyřešili překonávání odporové síly pomocí granulované fluidizaceFluidizace – proces obdobný zkapalnění pevné či plynné látky. Zrnitý materiál je převeden z pevného statického stavu do dynamického stavu podobného tekutině. K tomu se využívá průchodu plynu či kapaliny zrnitým prostředím směrem vzhůru proti gravitaci. Zrnka se pak vznášejí a chovají se jako tekutina., což je metoda, která se používá například ve stavebnictví. Vědce inspirovala jižní písečná chobotnice, která vytlačuje proud vody, aby se mohla zavrtat se do mořského dna.
Robot vyfukuje proud vzduchu ze své přední části, který hloubí a fluidizujeFluidizace – proces obdobný zkapalnění pevné či plynné látky. Zrnitý materiál je převeden z pevného statického stavu do dynamického stavu podobného tekutině. K tomu se využívá průchodu plynu či kapaliny zrnitým prostředím směrem vzhůru proti gravitaci. Zrnka se pak vznášejí a chovají se jako tekutina. okolní písek, čímž snižuje sílu, kterou potřebuje, aby se zavrtal do země. Vědci se dále potýkali se vztlakovou silou, která vzniká při horizontálním hrabání. Když se poprvé zkoušelo vodorovné hrabaní, tak se robot vždy vynořil na povrch. Nakonec problém vyřešil asymetrický směr proudění vzduchu a šikmý klínovitý tvar v přední části robota. Tento jedinečný design pomohl týmu vědců překonat „vztlakovou sílu“ při horizontálním hrabání. Princip asymetrie využívá také scink obecný, což je druh plazů, jemuž klínovitý nos pomáhá zavrtat se do písku.
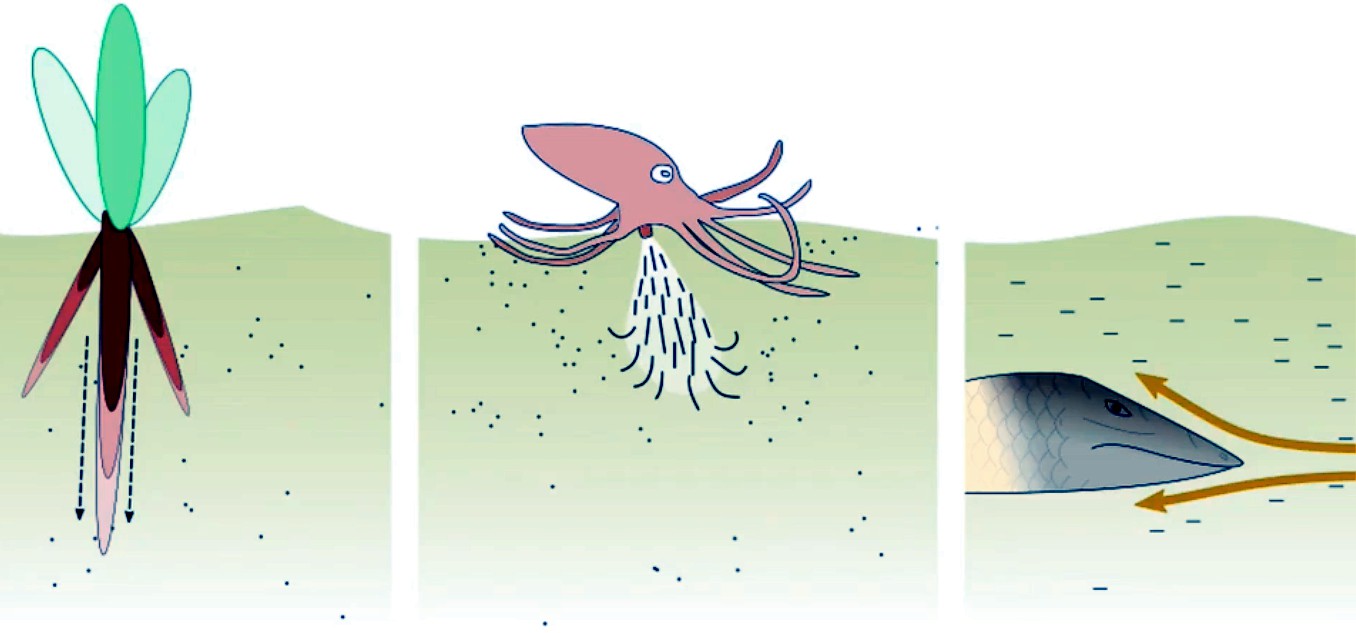
Princip hadího robota byl inspirovaný přírodou. Zdroj: UCSB Hawkes Lab.

Scink obecný neboli „písečná ryba“. Tato ještěrka může dýchat, i když je úplně ponořena v pouštním písku. Malé dýchací kapsy a speciálně vytvořený dýchací trakt zachycují vdechované částice, než se dostanou do plic. Tyto částice jsou poté vyloučeny kýcháním. Zdroj: Zbyněk Pokorný, Chov zvířat.
Hadí roboti hrabající na Měsíci
Jaké aplikace může mít tento hrabající se robotí had/červ? A bylo by možné jej zvětšit tak, aby vytlačil velké množství písku nebo zeminy? Ačkoli průlom v hrabání nelze očekávat pro pronikání půdy do hloubky přes několik metrů, tým vědců věří, že nabízí zlepšený výkon při dlouhém, mělkém, směrovém vrtání a má velké množství potenciálních aplikací v budoucnosti.
Pokud jde o použití na Zemi, nejslibnější jsou různé způsoby kopání příkopů. Jednou z prvních vizí, kterou autoři tohoto projektu měli, je, aby se robot zavrtal pod příjezdovou cestu a vynořil se nahoře až na druhé straně a pod cestou instaloval zavlažovací nebo komunikační linky, aniž by bylo nutné dělat povrchový výkop. Mezi další aplikace patří vyhledávání, záchranářské práce, instalace kabelů, inspekce sýpek atd.
Robot je obzvláště vhodný pro suchá mimozemská prostředí s nízkou gravitací, kde může být obtížné vytvářet reakční síly. V budoucnu se počítá s integrací prodloužené přední části s konvenčními technologiemi vrtání a průzkumu. Mezi příklady aplikací patří umístění tepelných senzorů na MarsuMars – rudá planeta se dvěma malými měsíci, Phobosem a Deimosem, je v pořadí čtvrtým tělesem Sluneční soustavy. Povrch planety je pokryt načervenalým pískem a prachem. Barva je způsobena vysokým obsahem železa. Načervenalá barva celé planety jí dala jméno (Mars je bůh válek). Na povrchu se nacházejí obrovské sopky, z nichž ta největší, Olympus Mons, je 22 km vysoká a její základna je 600 km široká. Na vrcholu je kráter o průměru 72 km. Pro Mars jsou charakteristické systémy kaňonů vzniklé pohybem kůry. Snímky ze sond ukazují místa, kudy dříve tekla voda. Zdá se, že Mars byl dříve vlhčí a teplejší, než je dnes. Rozpětí teplot, které na Marsu panují (zima není větší než v Antarktidě) by bylo snesitelné pro některé primitivní formy života žijící na Zemi. Jejich existence se však dosud nepotvrdila. Mars má tekuté jádra a pevné jadérko, které bylo objeveno v roce 2025., průzkum sopečných proláklin na MěsíciMěsíc – přirozený satelit Země, rotuje tzv. vázanou rotací (doba oběhu a rotace je shodná). Díky tomu stále vidíme přibližně jen přivrácenou polokouli Měsíce. Měsíc je prvním cizím tělesem, na kterém stanul člověk (Neil Armstrong, 1969, Apollo 11). Voda na Měsíci byla objevena v stinných částech kráterů a pod povrchem (Lunar Prospektor, 1998). Povrch Měsíce je pokryt regolitem (drobná drť s vysokým obsahem skla). Malé pevné jádro je obklopené plastickou vrstvou (v hloubce 1 000 km pod povrchem). Velké množství kráterů má rozměry od milimetrů po stovky kilometrů. Několik z nich je pojmenováno i po českých osobnostech (například kráter Anděl). včetně odběru vzorků, vytvoření kotevních prvků na planetkáchPlanetka – nesprávně asteroid, malé těleso o rozměrech maximálně stovek kilometrů na samostatné dráze kolem Slunce. Nejvíce planetek se nachází v tzv. Hlavním pásu mezi drahami Marsu a Jupiteru. Obdobná tělesa jsou i v Kuiperově pásu za drahou Neptunu. nebo průzkum sypkého ledu na Saturnově měsíci Enceladu.
Výzkum otevře zcela novou oblast systematického studia fyzikálních jevů, které mohou zlepšit výkonnost robotiky, a ta může naopak přispět ke studiu přírodních systémů. Bude možné prozkoumat další média, výrobní metody, techniky snižování tření. Zajímavý bude hlubší výzkum lokální fluidizaceFluidizace – proces obdobný zkapalnění pevné či plynné látky. Zrnitý materiál je převeden z pevného statického stavu do dynamického stavu podobného tekutině. K tomu se využívá průchodu plynu či kapaliny zrnitým prostředím směrem vzhůru proti gravitaci. Zrnka se pak vznášejí a chovají se jako tekutina. v sypkých médiích.
Výkonnost tohoto zařízení bude testována v simulátorech měsíční půdy a nízké gravitaci. Myšlenka využít této techniky k průzkumu prostředí s nízkou gravitací ve vesmíru může znít pošetile. Tým vědců však v současné době spolupracuje na projektu s NASANASA – National Aeronautics and Space Administration, americký Národní úřad pro letectví a kosmonautiku, byl založen prezidentem Eisenhowerem 29. července 1958. Jde o instituci zodpovědnou za kosmický program USA a dlouhodobý civilní i vojenský výzkum vesmíru. K nejznámějším projektům patří mise Apollo, která v roce 1969 vyvrcholila přistáním člověka na Měsíci, mise Pioneer, Voyager, Mars Global Surveyor a dlouhá řada dalších. a výsledky jsou slibné. Kdo ví: možná, že červí roboti ve vesmíru nejsou tak šíleným nápadem, jak to zní!
Video shrnuje, jak se rozšiřuje přední část, fluidizuje vzduch a jak asymetrie pomáhá
k vytvoření „měkkého“ robota pro hrabání. Zdroj: UCSB Hawkes Lab.
Odkazy
- Charles Q. Choi: Watch These Slithering Robots Climb Like a Sidewinder; Popular Mechanics, 9 Oct 2014
- Ben Coxworth: Snake robot learns to climb sand hills better, by moving like a sidewinder; New Atlas, 9 Oct 2014
- Katherine J. Wu: Let a Snake-Inspired Robot Be Your Hero Today; NOVA, 25 Feb 2019
- Sicheng Wang: Groundbreaking Soft Robot; Science Robotics 6/55, 23 Jun 2021
- Elle Hardy: This burrowing robot mimics nature to snake underground; Create, 29 Jun 2021
- Luke Dormehl: Part Terminator, part Tremors: This robotic worm can swim through sand; Digital Trends, 27 Jun 2021
- Jannat Un Nisa: This Snake-Like Robot Can Burrow Through Sand; Wonderfull Engineering, 19 Jun 2021
- Michael Irving: Tunneling snake robot takes cues from nature to keep its head in the sand; New Atlas, 17 Jun 2021
- Zbyněk Pokorný: Scink lékařský; Chov zvířat, 31. 10. 2013
- MOIA: Scincus scincus – scink obecný
- Wikipedia: Fluidization
- Wikipedia: Ripstop
![]()
![]()
