|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Což takhle robotický upgrade?
Petr Panchártek
Lidé jsou delší dobu fascinováni příležitostmi, které nabízí robotické vylepšení lidského těla. Tato vize závisí nejen na technologických inovacích, ale hlavně na schopnosti našeho mozku učit se, přizpůsobovat se a komunikovat s robotickými orgány. Úspěšného vylepšení lze dosáhnout například pomocí robotického extra palce. Jaké jsou ale jeho důsledky pro nervovou reprezentaci a funkci biologické ruky? Několik dobrovolníků bylo vyškoleno, aby používali robotický extra palec (nazývaný „třetí palec“) po dobu pěti dnů, a to jak laboratorně, tak v každodenním životě. Vědci zkoumali jejich schopnost rozvíjet interakce mezi rukou a robotickou částí. Vše vedlo ke zvýšenému pocitu ztělesnění třetího palce. Robotické vylepšení ovlivnilo klíčové aspekty vnímání ruky a její motorické schopnosti. Používání třetího palce oslabilo přirozenou kinematickou synergii biologické ruky. Sledování mozkové aktivity navíc odhalilo mírné snížení motorické reprezentace rozšířené ruky po tréninku, i když byl třetí palec odstraněn. Robotické vylepšení může způsobit změny ve vnímání biologické ruky. Takové důsledky jsou zásadní pro úspěšnou implementaci budoucích rozšiřujících technologií.

Používání robotického „třetího palce“ může ovlivnit, jak je
ruka vnímána mozkem.
Zdroj: University College London (UCL).
|
Dystonie – mimovolní svalové stahy a křeče, které vedou ke kroucení, záškubům a atypickému postavení postižených částí těla. Může postihnout jakoukoli část těla a často je vyprovokována zcela běžným pohybem. Motorika člověka – souhrn lidských pohybových projevů, zahrnuje pohyblivost, koordinaci pohybů, držení rovnováhy, pohyby prstů, řeč i pohyby očních svalů. Motorika je řízena centrální nervovou soustavou. Mozková kůra – latinsky cortex cerebri, nejvyšší část centrální nervové soustavy, plášť velkého mozku (telencephala). Kryje bílou hmotu hemisfér. Koordinuje veškerou činnost nervové soustavy. Primární motorická kůra – oblast mozkové kůry, která dává podněty k pohybům svalů, a zajišťuje tak volní motoriku. Elektrickou stimulací této oblasti lze vyvolat pohyby svalů. Oblast leží před střední mozkovou rýhou. Premotorická korová oblast – oblast před primární motorickou kůrou, která je aktivní při přípravě složitých volních pohybů. Vyházejí z ní dráhy do okohybných nervů, do prodloužené míchy i do míchy a motorických jader kmene. Propriocepce – polohocit, schopnost vnímat polohu a pohyb vlastního těla, systému nebo jeho částí bez vnějších senzorů. Tato schopnost zahrnuje vnímání svalového napětí, pohybu kloubů a rovnováhy, což je umožněno pomocí vnitřních senzorů, jako jsou receptory ve svalech, kloubech a šlachách. U člověka je propriocepce nezbytná pro správnou koordinaci pohybu, registraci změny polohy těla atd. |
Robotické vylepšení
Robotické vylepšení je rostoucí oblast zaměřená na rozšiřování našich fyzických schopností. Inženýři v současné době vyvíjejí robotické extra prsty a dokonce i celé paže, aby vylepšili naše těla rozšířením našeho přirozeného motorického repertoáru. Cílem těchto rozšiřujících zařízení je změnit způsob naší interakce s prostředím, což s sebou nese změny v tom, jak se pohybujeme a ovládáme své biologické tělo. Navzdory rychlému pokroku v rozšiřujících technologiích je však zásadní otázka, jak lidský mozek na tato rozšíření reaguje. Vědci zkoumali, zda by lidský mozek mohl převzít motorickou kontrolu nad extra robotickým prstem, se zaměřením na jeho dopad na nervovou reprezentaci biologické ruky.
Ruka má v mozku jedinečné funkční zastoupení, při němž je každý z prstů posuzován vzhledem k ostatním. Tento neurální otisk ruky se vyvíjí již od narození. Funkční zastoupení je vysoce konzistentní a je zachováno i po těžké ztrátě motorických funkcí, například v důsledku mrtvice, poranění míchy, postižení nebo dokonce amputace ruky. Nedávné studie o motorickém učení u dospělých lidí ukazují, že premotorickéPremotorická korová oblast – oblast před primární motorickou kůrou, která je aktivní při přípravě složitých volních pohybů. Vyházejí z ní dráhy do okohybných nervů, do prodloužené míchy i do míchy a motorických jader kmene. a temenní oblasti vykazují reorganizaci zastoupení funkcí rukou v raných fázích (první týden) intenzivního motorického tréninku. Zastoupení funkcí rukou v primární motorické kůřePrimární motorická kůra – oblast mozkové kůry, která dává podněty k pohybům svalů, a zajišťuje tak volní motoriku. Elektrickou stimulací této oblasti lze vyvolat pohyby svalů. Oblast leží před střední mozkovou rýhou. zůstává po celou dobu tréninku stabilní. Studie ukazují, že může být změněno jen za omezených okolností. V případě dystonieDystonie – mimovolní svalové stahy a křeče, které vedou ke kroucení, záškubům a atypickému postavení postižených částí těla. Může postihnout jakoukoli část těla a často je vyprovokována zcela běžným pohybem. bylo prokázáno, že se individualizované zastoupení funkcí jednotlivých prstů zhroutí. Jiný výzkum však nebyl schopen toto zjištění replikovat.
Skupinka účastníků studie používala robotický extra palec („třetí palec“) během pěti dnů jak při laboratorním tréninku, tak při „divokých“ každodenních činnostech. Třetí palec je nadpočetný robotický prst se dvěma stupni volnosti, ovládaný tlakem vyvíjeným na velké prsty. Je navržený k rozšíření přirozeného repertoáru pohybů rukou (viz následující klip a obrázek 1). Vědci zkoumali schopnost účastníků rozvíjet motorické dovednosti a obratnost pomocí třetího palce v každodenním životě. Klíčovými aspekty jsou interakce mezi rukou a robotickým orgánem, spolupráce, sdílený dohled a individualizace. Během tréninku vědci sledovali společné užívání prstů a porovnávali je s běžným používáním rukou. Testovali změny v motorické funkci s třetím palcem, stejně jako koordinaci mezi rukou a třetím palcem před a po tréninku. „Vylepšení“ účastníci studie byli srovnáváni s kontrolní skupinou, která podstoupila podobný tréninkový režim při nošení nepohyblivé verze třetího palce. Vědci rovněž zkoumali, jak se po tréninku změnilo nervové vnímání ruky a těla.
Přehled studijního přístupu, tréninkových úkolů a klíčových výsledků.
Zdroj: ScienceRobotics.
Vědci pomocí „třetího palce“ zkoumali, jak se mozky lidí přizpůsobují, když se učí používat robotický extra prst. Zjistili, že po pěti dnech tréninku byli účastníci schopni integrovat motorické ovládání palce s pohyby jejich přirozené ruky a měli zvýšený pocit, že robotické zařízení je součástí jejich těla. Používání palce ale ovlivnilo přirozené pohyby rukou účastníků a jejich funkční zastoupení v mozku.
Třetí palec
Třetí palec je trojrozměrný (3D) tištěný robotický palec, původně navržený jako rozšiřující a obecně použitelný nástroj pro lidi se zdravým tělem (viz klip výše). Palec se nosí na malíčkové hraně pravé dlaně, naproti přirozenému palci uživatele (obr. 1A, 1B). Je ovládán dvěma motorky, což umožňuje nezávislé ovládání obou stupňů volnosti. Motory jsou upevněny na řemínku na zápěstí (obr. 1A, 1) a jsou napájeny z externího akumulátoru umístěného nahoře na paži (obr. 1A, 2). Pohyb palce je řízen tlakovými senzory upevněnými na spodní straně prstů nohou uživatele (obr. 1B). Senzory tlaku jsou napájeny z externích baterií upevněných kolem každého kotníku (obr. 1A, 3). K odesílání signálu z tlakových senzorů do motorků, které ovládají palec, se používá bezdrátový komunikační protokol. Tlak vyvíjený pravým prstem táhne palec přes ruku (flexe), zatímco tlak vyvíjený levým prstem táhne palec nahoru k prstům (addukce). Rozsah pohybu palce je úměrný použitému tlaku. Palec lze tedy ovládat, pokud sedíte nebo stojíte, ale ne při chůzi. Bezdrátový design umožňuje provozovat palec v každodenním životě, což účastníkům studie poskytlo jedinečnou příležitost, aby používali palec mimo laboratoř a bez dozoru.
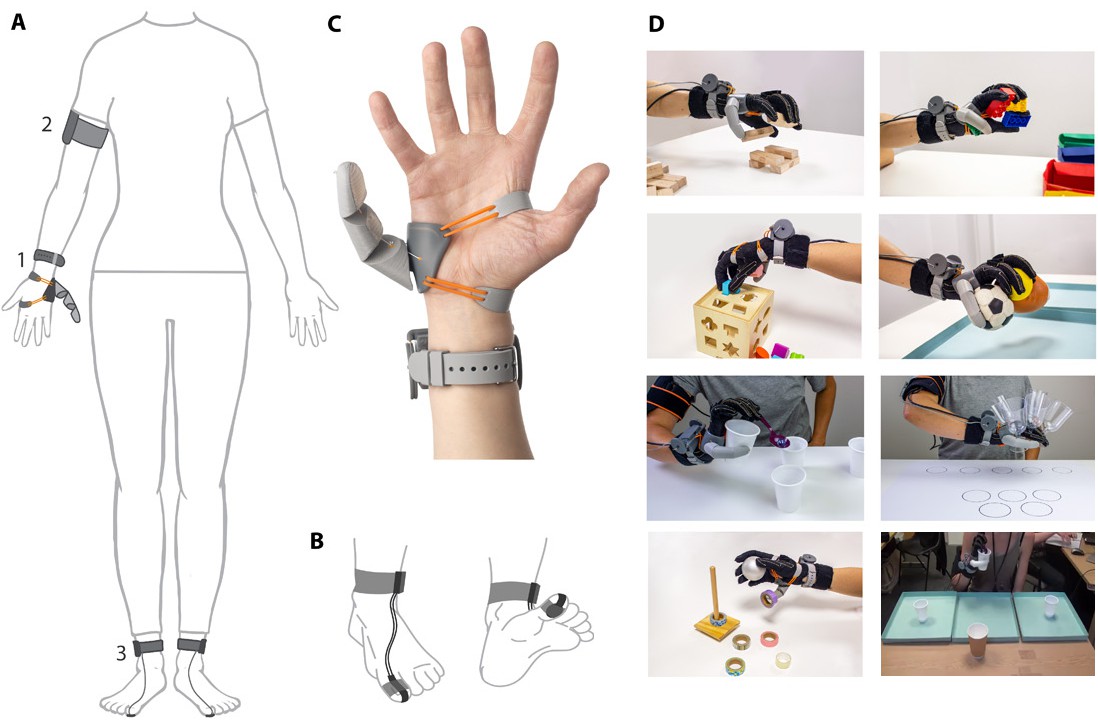
Obr. 1. Experimentální studie. A, B, C: robotický palec, jeho
umístění a ovládání.
D: Příklady laboratorních tréninkových úkolů. Zdroj:
ScienceRobotics.
Denní trénink
Vědci během pěti dnů testovali motorickou schopnost ruky vylepšené pomocí třetího palce. „Vylepšení“ účastníci studie absolvovali pět denních školení v laboratoři a byli navíc vyzváni, aby používali palec i mimo laboratoř v prostředí každodenního života.
Během tréninkových seminářů byli seznámeni s řadou úkolů, například dosáhnutí, uchopení a manipulace v ruce. Cílem bylo zvládnout složité interakce ruky a robotického palce a zkusit provádět náročné činnosti pouze jednou rukou (viz klip výše). V rámci úkolů museli účastníci použít palec společně s dalším prstem k sbírání několika objektů současně. Při úkolech museli účastníci používat palec tak, aby zlepšili přirozené sevření ruky a obešli se při tom bez svých biologických prstů. V úkolu na individualizaci museli účastníci zvládnout jemné motorické ovládání třetího palce, zatímco měli ruku plně obsazenou nepodstatným objektem.
V dalším úkolu koordinovali účastníci spolupráci ruky a třetího palce, což vyžadovalo, aby svými biologickými prsty vytvořili protitlak třetímu palci. Přestože se ovládání třetího palce pomocí palců u nohou může zdát neobvyklé, účastníci byli schopni úspěšně koordinovat základní pohyby třetího palce a ruky (viz obrázek 2). V průběhu tréninku se koordinace významně zlepšovala.

Obr. 2. Spolupráce třetího palce s ostatními prsty ruky. Zdroj: ScienceRobotics.
Klíčovou součástí úspěšného vylepšení činnosti ruky je schopnost multitaskingu bez nutnosti věnovat pozornost ovládání zařízení. Motorická schopnost účastníků studie „vylepšených“ třetím palcem nebyla ovlivněna zvýšenou kognitivníKognitivní funkce – schopnost poznávat okolí, reagovat a zvládsat úkoly. Jde o paměť, koncentraci, pozornost, zpracování informací, pohotovost, ale i vyjadřování, prostorovou orientaci atd. zátěží. Vědci tuto souvislost zkoumali během prvního a posledního dne tréninku pomocí paralelních úloh, které vyžadovaly, aby účastníci prováděli jednoduché aritmetické operace a současně používali palec k dokončení jiného úkolu (stavby věže). Účastníci udělali několik aritmetických chyb (v průměru 15 až 19 % pokusů na účastníka), což ukazuje, že paralelní úkol sice nezměnil motoriku, ale zvýšil nároky na kognitivní zátěž. Výsledky naznačují, že se účastníci naučili ovládat palec za různých okolností, přesahujících rámec jejich specifického tréninku, a prováděli úkony podobně se zvýšenou kognitivní zátěží i bez ní. Porovnání s kontrolní skupinou naznačuje, že k efektivnímu prospěchu z motorického vylepšení je zapotřebí rozsáhlá dlouhodobá praxe.
Po použití třetího palce se změní vnímání biologické ruky
Vědci pozorovali změněné vzorce koordinace prstů ve „vylepšené“ studijní skupině ve srovnání s kontrolní skupinou. Snažili pochopit, zda může použití třetího palce ovlivnit biologickou reprezentaci ruky v senzomotorické kůře. Vědci skenovali mozek pomocí tzv. funkční magnetické rezonance (fMRI), aby porovnali nervové vnímání ruky před a po použití třetího palce. Během skenování byli účastníci povinni provádět individuální pohyby biologických prstů. Z důvodu bezpečnosti neměli účastníci během skenování třetí palec.
Aby vědci prozkoumali změny ve vnímání rozšířené ruky, odhadli odlišnost mezi vícerozměrnými vzory aktivity vyvolanými pohyby jednotlivých prstů v senzomotorické kůře, které bylo měřeno křížově validovanou Mahalanobisovou vzdálenostíMahalanobisova vzdálenost – MV, pravděpodobnostní vzdálenost od průměru. Dá se přirovnat ke vzdálenosti od střední hodnoty jednorozměrného výběru v jednotkách sigma. Velká hodnota MV je málo pravděpodobná, a tedy podezřelá.. Malé Mahalanobisovy vzdálenosti mezi prsty ukazují, že vnímání obou prstů je podobné nebo se překrývá, zatímco větší vzdálenosti znamenají individualizovanější vnímání prstů. Tento experimentální přístup je současným zlatým standardem v oboru a je široce používán ke studiu plasticity a stability zobrazení ruky.
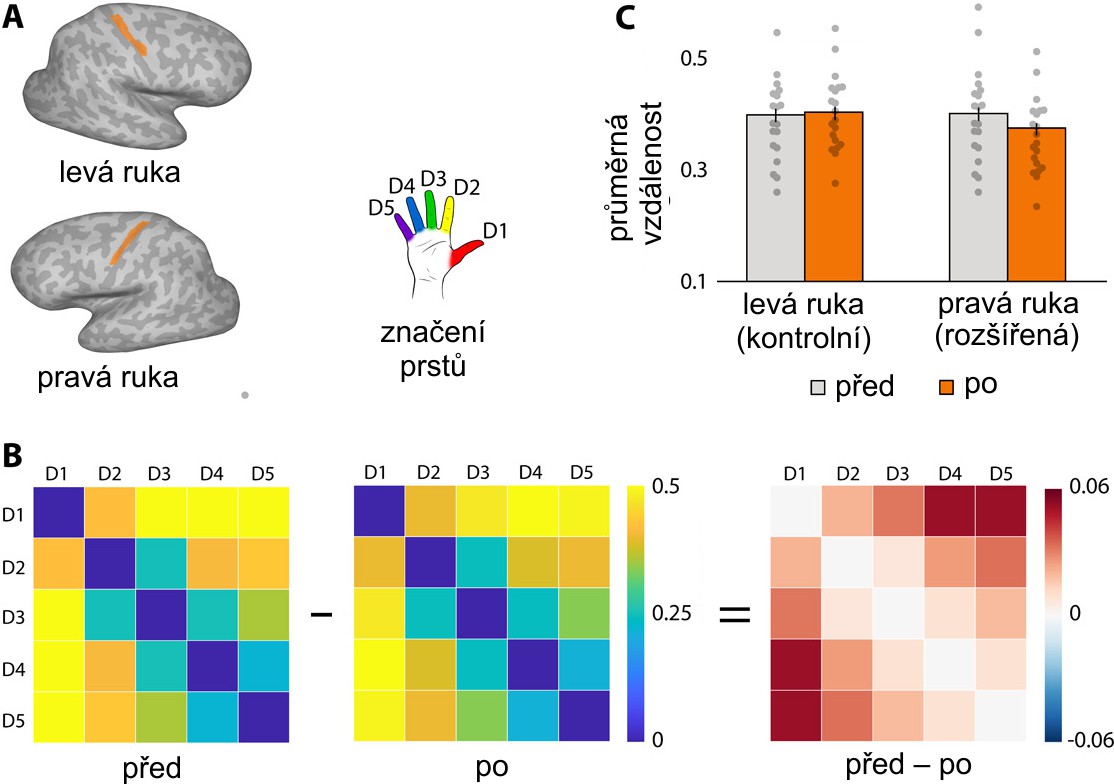
Obr. 3. Změny ve vnímání rozšířené ruky. A: Senzomotorická oblast ruky byla definována anatomicky na základě primární segmentace motorické kůry. B: Skupina znamená matici odlišnosti pravé (rozšířené) ruky před a po tréninku. Každá buňka zobrazuje Mahalanobisovu (křížově ověřenou) vzdálenost mezi reprezentačními vzory dvou prstů libovolné jednotky. C: Průměrné vzdálenosti mezi prsty pravé (vylepšené), ale ne levé (nevylepšené) ruky se po použití palce významně snížily. Zdroj: ScienceRobotics.
Závěr
Účastníci studie prokázali významná zlepšení motorické schopnosti u různých úkolů po pouhých pěti dnech používání třetího palce. Dále měli možnost integrovat motorické ovládání třetího palce s pohyby jejich přirozené ruky, což vyžaduje spolupráci, sdílený dohled a koordinaci robota. Motorická schopnost se výrazně zlepšila i bez vizuální zpětné vazby a zůstala stabilní i při zvýšené kognitivní zátěži. Schopnost úspěšně koordinovat třetí palec s biologickou rukou v různých úkolech byla zásadní pro úspěšné přijetí rozšiřujícího zařízení. Dále se ukázalo že vylepšená ruka s robotickým palcem vedla ke zvýšenému pocitu ztělesnění (považování robotického palce za vlastní součást těla), což je klíčový předpoklad pro vylepšení této technologie.
Výzvou je zajistit, aby používání zařízení nemělo vliv na schopnost uživatelů ovládat své biologické tělo, zvláště když rozšiřující zařízení není momentálně používáno nebo dokonce nošeno. Kritickou otázkou pro bezpečné zlepšení motoriky je tedy to, zda by došlo ke změnám vnímání biologického těla uživatele. Vzhledem k tomu, že vylepšení motoriky je navrženo tak, aby změnilo způsob naší interakce s prostředím, je rozumné předpovídat, že vylepšení sebe sama přetvoří neurální základ našeho biologického těla. Navíc, protože jsme se nenarodili s vrozenou schopností ovládat další robotické části těla, úspěšné vylepšení motoriky pravděpodobně vyžaduje rozsáhlou dlouhodobou praxi.
Obecně je zastoupení těla v senzomotorické kůře považováno za vysoce adaptivní i v mozku dospělého člověka, nedávný výzkum však přispívá na jeho tvárnost novým pohledem. Byly navrženy nástroje k aktualizaci zastoupení biologického těla v mozku, například integrací nástroje a těla. Při použití nástroje není nutné radikálně měnit funkci ruky (například uživatel zvolí uchopení rukojeti nástroje, které odpovídá přirozeným synergiím prstů). Proto použití nástroje neznamená aktualizovanou reprezentaci samotné ruky v mozku. Motorické vylepšení naopak vyzývá uživatele, aby znovu objevil způsob, jakým používá své vlastní tělo. V důsledku toho motorická integrace robotického palce změnila přirozené koordinační vzorce prstů (kinematické synergie) vylepšené ruky, přičemž skupina s robotickým palcem vykazovala složitější pohybové vzorce než kontrolní skupina. Situace se podobá získávání nových a složitých motorických dovedností, například výuce hry na klavír. Nedávný výzkum ukázal, že dlouhodobé školení vede ke změnám ve vnímání prstů. Konkrétně vyškolení pianisté (v průběhu mnoha let, počínaje dětstvím) vykazují změněnou reprezentaci rukou (nižší reprezentační vzdálenosti mezi prsty) ve srovnání s nováčky. Tento fakt dále zdůrazňuje potřebu zkoumat, jak může dlouhodobé vylepšení motoriky ovlivnit biologickou reprezentaci rukou.
Odkazy
- Paulina Kieliba et al.: Robotic hand augmentation drives changes in neural body representation; Science Robotics 6/54, 19 May 2021
- UCL News: Robotic ‘Third Thumb’ use can alter brain representation of the hand; 20 May 2021
- Eva Koriťáková, Ladislav Dušek: Pokročilé metody analýzy dat v neurovědách; Institut biostatistiky a analýz Masarykovy univerzity, 2016
- Wikipedie: Motorika člověka
- Wikiskripta: Mozková kůra
- Wikiskripta: Dystonie
- Wikiskripta: Propriocepce
![]()
![]()
