|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Pneumobot a la želva
Petr Panchártek
Pneumaticky ovládaní měkcí roboti začali přizpůsobovat své schopnosti okolnímu prostředí. V minulosti byli tito roboti ovládání elektromechanickými součástkami, jako jsou ventily a čerpadla, které jsou obvykle objemné a drahé. Nyní byl představen koncept, v němž nejsou roboti s měkkými nohami závislí na elektronických součástkách a jsou řízeni jen jednoduchými pneumatickými obvody. Tento koncept vytváří pohybové kroky pomocí kruhových oscilátorů složených z měkkých ventilů, které generují oscilující signály, na něž reagují pneumatické logické komponenty na základě odezvy na vstupní senzory. Robot vyžaduje pouze zdroj stlačeného vzduchu k napájení řídicích a akčních systémů.

Tento čtyřnohý měkký robot používá ke své chůzi jen pneumatické
obvody
bez jakékoliv elektroniky. Zdroj: IEEE Spectrum, foto UCSD.
|
CPG – Central Pattern Generators, centrální generátory vzorů, biologické neurální obvody, které produkují rytmické výstupy při absenci rytmického vstupu. Jsou zdrojem úzce spjatých vzorů nervové aktivity, které řídí rytmické a stereotypní motorické chování, jako jsou chůze, plavání, létání, ejakulace, močení, vyprazdňování, dýchání nebo žvýkání. Schopnost fungovat bez vstupu z vyšších oblastí mozku stále vyžaduje modulační vstupy a jejich výstupy nejsou pevné. Flexibilita v reakci na smyslový vstup je základní kvalitou chování řízeného CPG. Lokomoce člověka – schopnost pohybu v prostoru pomocí svalové činnosti. Je zajištěna pomocí lokomočního systému, který je podsystémem pohybového systému, jenž zajišťuje a řídí aktivní přemístění živého organizmu v daném prostoru a čase. U dospělého člověka a některých primátů dominují v zajištění lokomoce dolní končetiny (tzv. bipedální lokomoce). Lokomoce živočichů – přemísťování živočichů z místa na místo. Pohyb probíhá buď prouděním protoplazmy (například u měňavky), nebo stahy svalů u větších živočichů. Podle prostředí, v němž se pohyb provádí, se rozlišuje například chůze (běh), plavání nebo let. Měkká robotika – specifická podoblast robotiky zabývající se konstrukcí robotů z vysoce pružných materiálů, podobných těm, které se nacházejí v živých organizmech. |
Pneumatický čtyřnožec
V poslední době měkcí roboti, kteří k dosažení složitých pohybů používají pružné materiály, zjednodušili interakci se složitým prostředím a umožnili bezpečnou interakci s lidmi. K ovládání měkkých robotů byly představeny různé koncepty, včetně systémů poháněných pneumatickým nebo hydraulickým tlakem, šlachami nebo inteligentními materiály. Pneumatické ovládání je zvláště atraktivní pro mnoho aplikací z důvodu nízké složitosti výroby a komerční dostupnosti požadovaných komponent. Obecně tento koncept zahrnuje nafouknutí uzavřené komory v měkkém těle řízené přívodním tlakem. Materiálová nebo geometrická asymetrie pak způsobí, že se měkké tělo bude pohybovat předepsaným směrem (například se může ohýbat, kroutit, prodlužovat či smršťovat).
Schopnost měkkých robotů přizpůsobit se proměnlivému terénu zvyšuje jejich mobilitu. Pneumaticky ovládaný robot s měkkými nohami a se třemi stupni volnosti na jednu končetinu byl schopen pohybu v různých terénech (například v planinách nebo v údolích pokrytých volnými kameny a oblázky) pomocí velmi jednoduchých vzorů chůze. Robot může, díky pružnosti jeho měkkých končetin, vniknout do stísněných prostor. Robot je schopen reagovat na hydrodynamické síly, které „pociťuje“ při chůzi pod vodou, a zlepšit tak pohyb za různých podmínek okolního proudění.
Příroda poskytuje i inspiraci, jak generovat pohyb z oscilačních obvodů. Analogii řídicích obvodů známých jako centrální generátory vzoru (CPGCPG – Central Pattern Generators, centrální generátory vzorů, biologické neurální obvody, které produkují rytmické výstupy při absenci rytmického vstupu. Jsou zdrojem úzce spjatých vzorů nervové aktivity, které řídí rytmické a stereotypní motorické chování, jako jsou chůze, plavání, létání, ejakulace, močení, vyprazdňování, dýchání nebo žvýkání. Schopnost fungovat bez vstupu z vyšších oblastí mozku stále vyžaduje modulační vstupy a jejich výstupy nejsou pevné. Flexibilita v reakci na smyslový vstup je základní kvalitou chování řízeného CPG.) používají přírodní organizmy k vytváření rytmických pohybů, jako jsou chůze, létání a plavání. Například CPG pozorované u pulců drápatky a mihule vytvářejí zjednodušené oscilační pohyby s minimální zpětnou vazbou. Zvířata používají senzory k regulaci svých oscilačních vzorů chůze na základě prostředí, ve kterém se pohybují. Jako příklady lze uvést strašilky, které zdolávají velké mezery díky změně rychlosti chůze na základě zpětné vazby od svých tykadel, a šváby, kteří používají tykadla k detekci stavu zeminy, na níž stojí a přizpůsobují tomu svou chůzi.
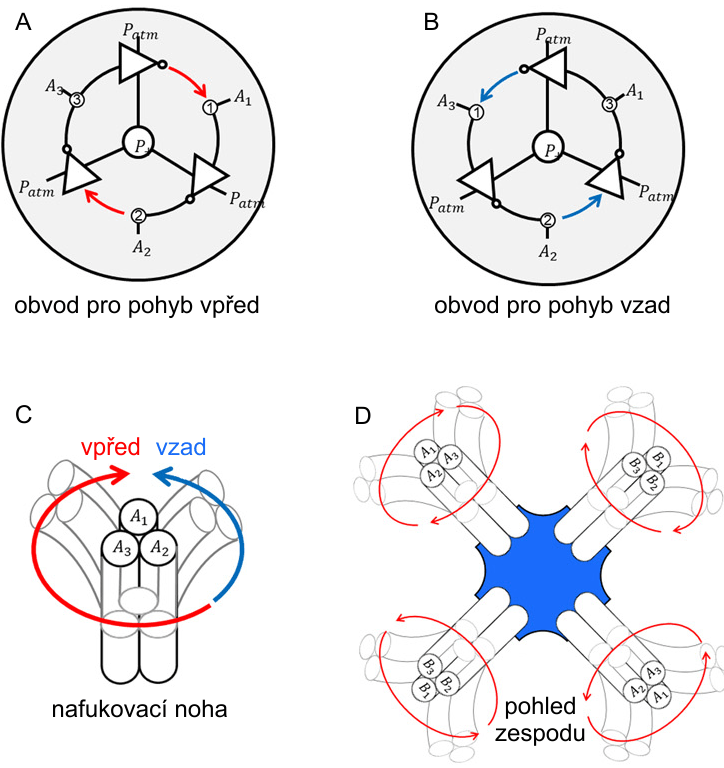
Obr. 1: (A) Pneumatický logický obvod pro rytmický pohyb nohou. Zdroj konstantního přetlaku (P+) aplikovaný na tři komponenty střídače způsobí, že se vysokotlaký stav šíří po obvodu se zpožděním u každého měniče. Zatímco je vstup do jednoho měniče vysoký, připojený akční člen (tj. A1, A2 nebo A3) se nafoukne. Tato posloupnost stavů vysokého tlaku způsobí, že se každá dvojice nohou robota otáčí ve směru určeném pneumatickými spoji. (B) Obrácením sekvence aktivace obvodu pneumatického oscilátoru se připojené akční členy nafouknou v nové sekvenci (A1, A3 a A2), což způsobí (C) otáčení nohou robota v opačném směru. (D) Schematický pohled zdola na nohy robota s vyznačenými směry pohybů nohou pro chůzi vpřed. Zdroj: IEEE Spectrum.
Měkký čtyřnohý design
Návrh měkkého čtyřnožce obsahuje tři pneumatické komory na jednu nohu. Čtyři končetiny vycházejí z těla robota dvěma kolmými svislými rovinami symetrie. Každá končetina je skloněna směrem dolů pod úhlem 45° vzhledem k vodorovné rovině a skládá se ze tří spojených paralelních pneumatických válcových komor s měchy. Když je komora pod tlakem, končetina se ohne v opačném směru (Obr. 2). Tři komory každé končetiny zajišťují víceosý ohyb potřebný pro chůzi.
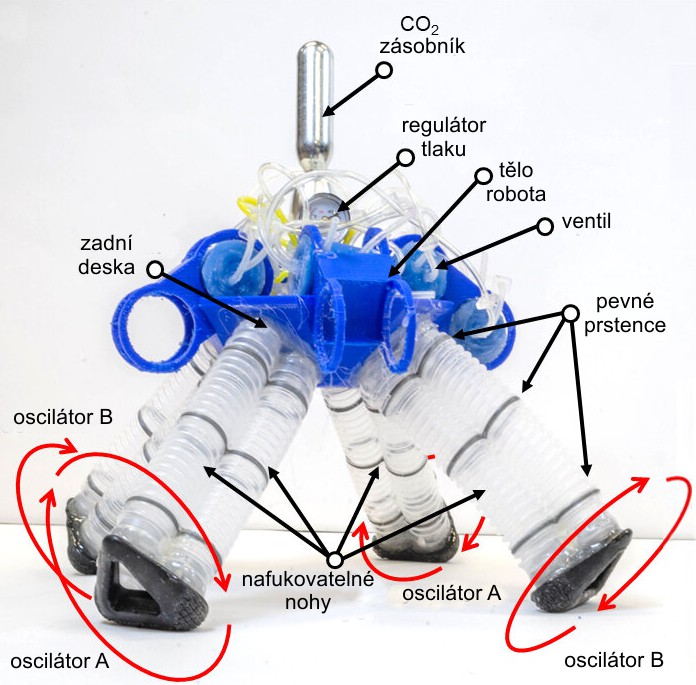
Obr. 2: „Nepřipoutaný“ čtyřnohý robot s palubními měkkými ventily poháněnými nádobou CO2, ktrerá reguluje tlak. Na obrázku jsou označeny klíčové komponenty, stejně jako směry pohybů nohou pro chůzi vpřed. Pneumatické oscilátory se používají k ovládání pohybů každého páru diagonálních nohou pro rytmickou chůzi vpřed. Nohy robota jsou v neutrálním stavu dlouhé 173 mm od základny k chodidlu. Zdroj: Science Robotics.
Ovládání diagonální rytmické chůze
Chůze je pro robotického čtyřnožce předurčena délkou nafouknutí či vyfouknutí tří komor každé nohy. Namísto individuálního adresování všech dvanácti komor se ovládání robota zjednodušuje pomocí spárování dvou podobných komor na nohách umístěných vzájemně na úhlopříčce (viz Obr. 3). Tři spárované komory jednoho diagonálního páru jsou označené jako A1, A2 a A3 a tři spárované komory druhého diagonálního páru jako B1, B2 a B3.
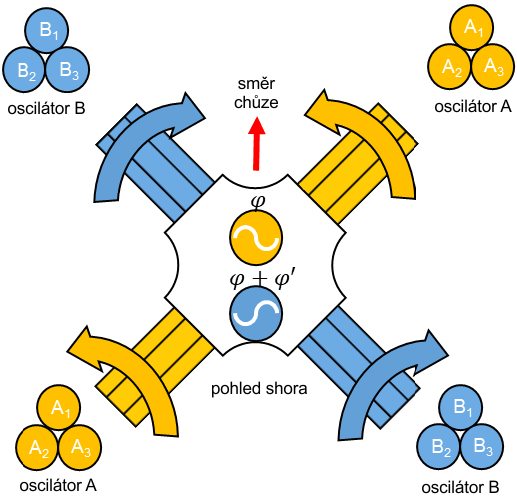
Obr. 3: Schéma čtyřnohého robota ovládaného oscilátory A, B.
Oscilátor B je
od A fázově posunut o úhel φ'. Zdroj: Science Robotics.
Časovaná aktivace spárovaných komor A1, pak A2 a poté A3 způsobuje, že se první pár nohou otáčí stejným směrem, což umožní, aby robot udělal diagonální krok. Podobně sekvence B1, B2 a poté B3 způsobí, že robot vykročí napříč jako africká želva (viz následující klip).
Klip 1: Video africké želvy Sideneck vykazující diagonální chůzi.
Zdroj: Science Robotics.
Reverzní sekvence ovládání komor ve dvojici nohou (např. A1, A3 a A2) způsobuje, že se robot pohybuje v opačném směru. Takže s lineární kombinací kroků vpřed nebo vzad s dvojicemi diagonálních nohou může robot kráčet jakýmkoli směrem (viz Klip 2). Otáčení je také možné obrácením směru otáčení jedné nohy ve dvojici vzhledem k druhé. Zjednodušený systém řízení chůze pro všesměrovou lokomoci tedy vyžaduje, aby se dvojice diagonálních nohou mohly otáčet ve směru i proti směru hodinových ručiček.
Klip 2: Vzduchem napájené obvody bez elektroniky pro řízení rytmického
pohybu robota s měkkými nohami. Zdroj: Science Robotics.
Rytmický pohyb nohou s měkkým kruhovým oscilátorem
Pro ovládání výše popsaných sekvencí chůze bez elektroniky je použito měkkých pneumatických řídicích obvodů. Základní rytmický pohyb dvojice nohou je generován měkkým kruhovým oscilátorem, který působí jako pneumatické CPGCPG – Central Pattern Generators, centrální generátory vzorů, biologické neurální obvody, které produkují rytmické výstupy při absenci rytmického vstupu. Jsou zdrojem úzce spjatých vzorů nervové aktivity, které řídí rytmické a stereotypní motorické chování, jako jsou chůze, plavání, létání, ejakulace, močení, vyprazdňování, dýchání nebo žvýkání. Schopnost fungovat bez vstupu z vyšších oblastí mozku stále vyžaduje modulační vstupy a jejich výstupy nejsou pevné. Flexibilita v reakci na smyslový vstup je základní kvalitou chování řízeného CPG.. Měkký kruhový oscilátor reaguje na tlak, který působí jak jako signál (tj. indikuje, kdy má oscilovat), tak jako zdroj energie.
Pro generování rytmického pohybu dvojice nohou je jeden port každého ventilu s měkkým kruhovým oscilátorem připojen k pneumatickým komorám končetiny. Jedna sada spárovaných ramen (například komory A1, A2 a A3) je připojena k uzlům obvodu oscilátoru (Obr. 4, A, C, D), které generují tlak v připojených komorách (Obr. 4B). Tlak generovaný v každé komoře během tohoto procesu má v průběhu cyklu průměrnou hodnotu 9,4 kPa.
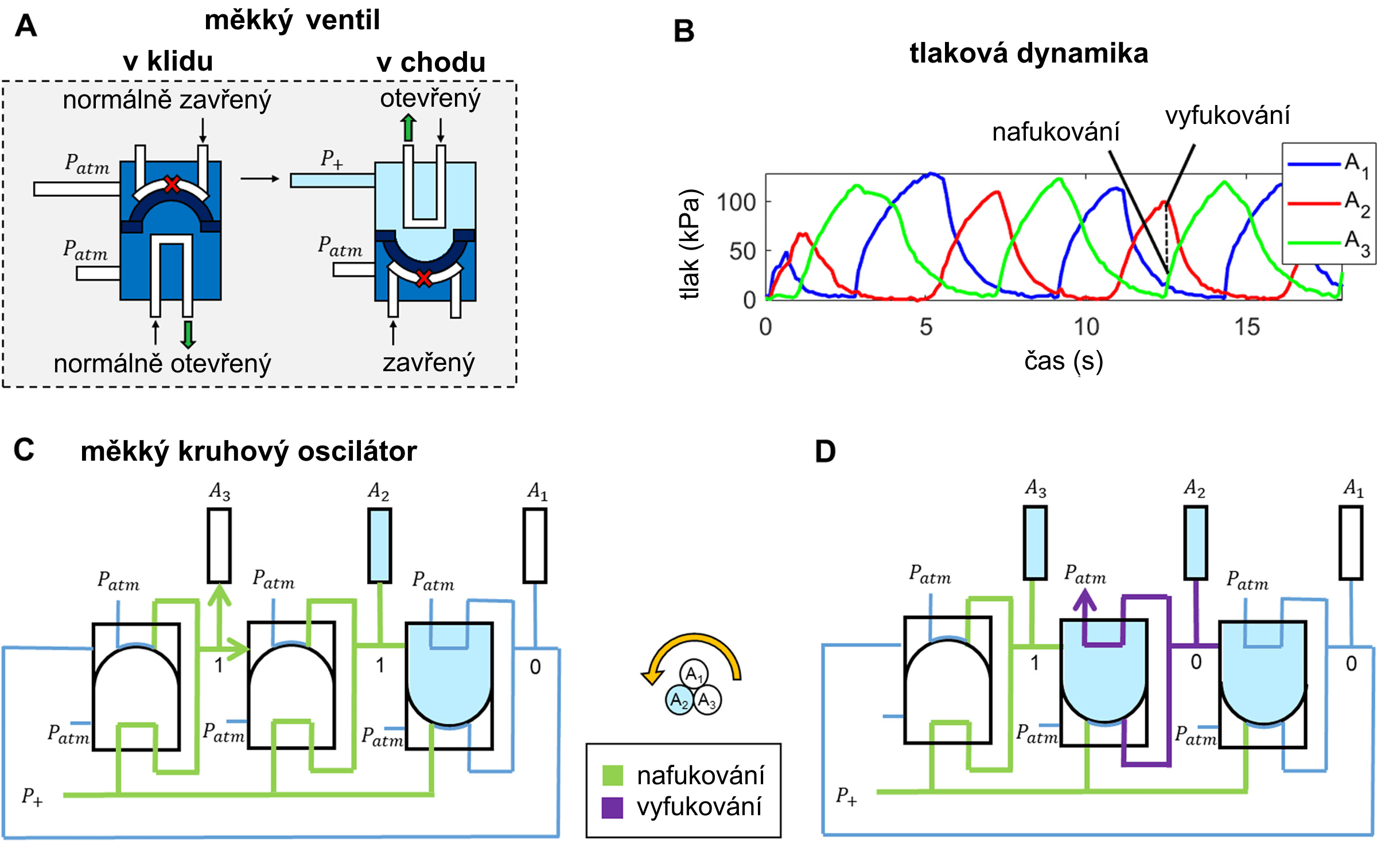
Obr. 4: Koncept měkkého kruhového oscilátoru. (A) Každý z ventilů funguje jako měnič přepnutím normálně uzavřené poloviny (nahoře) na otevřenou a normálně otevřené poloviny (dole) na zavřenou. (C a D) Měkký kruhový oscilátor je navržen tak, aby sledoval nafouknutí a vyfouknutí různých komor na robotovi (např. oscilátor A: A1, A2 a A3). Měkký kruhový oscilátor aktivuje komory postupně, což vede k rotaci končetin v kruhu. Tato schémata zobrazují okamžiky bezprostředně před (C) a po (D) nárůstu tlaku v komoře A3 nad tlak průniku ventilu (Pst = 35 kPa). V (C) se nafukují jak A2, tak A3. V (D), jakmile je tlak v A3 větší než Pst, výfuk pro A2 se otevře a A2 začne vyfukovat, jak je znázorněno. (B) Reprezentativní graf tlaku ve třech uzlech oscilátoru při uvedení do činnosti při 150 kPa. Okamžiky zobrazené v (C) a (D) jsou na grafu označeny jako nafukování a vyfukování. Zdroj: Science Robotics.
Závěr
Nový pneumatický robot má určité podobnosti s roverem, který JPLNASA JPL – Jet Propulsion Laboratory, oddělení NASA zabývající se konstrukcí raketových pohonů. NASA – National Aeronautics and Space Administration, americký Národní úřad pro letectví a kosmonautiku, založen byl v roce 1958. Jde o instituci zodpovědnou za kosmický program USA a dlouhodobý civilní i vojenský výzkum vesmíru. K nejznámějším projektům patří mise Apollo, která v roce 1969 vyvrcholila přistáním člověka na Měsíci, mise Pioneer, Voyager, Mars Global Surveyor a dlouhá řada dalších. (Jet Propulsion Laboratory) vyvíjí k prozkoumání VenušeVenuše – nejbližší planeta vzhledem k Zemi. Hustá atmosféra zabraňuje přímému pozorování povrchu. Díky skleníkovému efektu je na povrchu vysoká teplota, nejvyšší dosud naměřená hodnota činí 480 °C. Venuše obíhá kolem Slunce takřka po kruhové dráze ve vzdálenosti 108 milionů kilometrů s periodou 225 dní. Otočení kolem vlastní osy (proti oběhu, tzv. retrográdní rotace) trvá 243 pozemských dnů. To znamená, že na Venuši Slunce vychází a zapadá jen dvakrát za jeden oblet Slunce. Oblaka Venuše dobře odrážejí sluneční svit a proto je tato planeta po Slunci a Měsíci nejjasnějším tělesem na obloze. Na večerní obloze ji můžeme spatřit jako Večernici a na ranní obloze jako Jitřenku.. Rover samozřejmě není měkký robot, ale pracuje za podobných podmínek – nemůže se spoléhat na konvenční elektronické systémy pro autonomní navigaci nebo ovládání. Ukazuje se, že existuje spousta chytrých způsobů, jak využít mechanickou (nebo v tomto případě pneumatickou) inteligenci k výrobě robotů s relativně složitým autonomním chováním, což znamená, že v budoucnu by se mohli měkcí (nebo jemní) roboti skvěle uplatnit v situacích, kdy použití elektronického systému není dobrou volbou.
Odkazy
- Evan Ackerman: Soft Legged Robot Uses Pneumatic Circuitry to Walk Like a Turtle; IEEE Spectrum, 20 Feb 2021
- Dylan Drotman et al.: Electronics-free pneumatic circuits for controlling soft-legged robots; Science Robotics 6/51, 17 Feb 2021
- Ruth Jocelyn Flynn: Africká želva Sideneck; My Happy Pet Shop
- Wikipedia: Central pattern generator
- Wikipedia: Lamprey
- Wikipedia: Soft Robotics
- Wikipedie: Strašilky
- Wikipedie: Švábi
- Wikipedia: Xenopus
![]()
![]()
