|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Čtyřnohý ANYmal na obchůzce
Petr Panchártek
Společnost Anybotics nedávno ohlásila novou generaci svého čtyřnohého autonomního robota. Tento robot s názvem ANYmal C je optimalizován pro průmyslové inspekční úkoly, kde může poskytnout bezpečnost a spolehlivost pro automatizované rutinní kontroly. Autonomní systém provádějící předem definované mise může bezpečně a spolehlivě procházet průmyslovými závody a pomocí široké škály senzorů shromažďovat a interpretovat údaje o zařízeních a životním prostředí.

Curyšská ETHETH – prestižní švýcarská polytechnika, na které působil mj. Albert Einstein. Zkratka ETH znamená Eidgenössische Technische Hochschule (Spolková vysoká technická škola). Univerzita byla založena v roce 1855, nyní má dvě části: v Curychu (ETHZ) a v Laussane (ETHL). S univerzitou je spojeno 26 nositelů Nobelových cen. testuje pokročilé pohybové schopnosti ANYmala C v nestrukturovaném přírodním terénu. Zdroj: ETH Curych, Robotic Systems Lab.
|
Autonomie – schopnost činit samostatná nevynucená rozhodnutí. Daná skupina (či jednotlivec) se řídí pravidly a zákony, které si sama dává a dobrovolně přijímá. Framework – aplikační rámec. Softwarová struktura, která slouží jako podpora při programování a vývoji a organizaci jiných softwarových projektů. Může obsahovat podpůrné programy, knihovny API, podporu pro návrhové vzory nebo doporučené postupy při vývoji. Lokomoce člověka – schopnost pohybu v prostoru pomocí svalové činnosti. Je zajištěna pomocí lokomočního systému, který je podsystémem pohybového systému, jenž zajišťuje a řídí aktivní přemístění živého organizmu v daném prostoru a čase. U dospělého člověka a některých primátů dominují v zajištění lokomoce dolní končetiny (tzv. bipedální lokomoce). Lokomoce živočichů – přemísťování živočichů z místa na místo. Pohyb probíhá buď prouděním protoplazmy (například u měňavky), nebo stahy svalů u větších živočichů. Podle prostředí, v němž se pohyb provádí, se rozlišuje například chůze (běh), plavání nebo let. LIDAR – Light-Imaging Detection and Ranging, detekce a určování vzdálenosti za pomoci laseru. Jde o metodu zjišťování vzdálenosti a vlastností objektu na základě analýzy rozptýleného světla laseru. Analogií v rádiovém oboru jsou radary. Vzdálenost objektu se určí z časové prodlevy odraženého signálu. Lidary se využívají hojně v geologii, seismologii a při sledování vlastností atmosféry. Propriocepce – polohocit, schopnost vnímat polohu a pohyb vlastního těla, systému nebo jeho částí bez vnějších senzorů. Tato schopnost zahrnuje vnímání svalového napětí, pohybu kloubů a rovnováhy, což je umožněno pomocí vnitřních senzorů, jako jsou receptory ve svalech, kloubech a šlachách. U člověka je propriocepce nezbytná pro správnou koordinaci pohybu, registraci změny polohy těla atd. ROS – robotický operační systém neboli robotický middleware (tj. kolekce softwarových frameworků pro vývoj softwaru robotů). Ačkoli ROS není operační systém, poskytuje služby určené pro heterogenní počítačový klastr, jako jsou abstrakce hardwaru, ovládání zařízení na nízké úrovni, implementace běžně používaných funkcí, předávání zpráv mezi procesy a správa balíčků. |
Když dvě nohy nestačí…
Některá z nejnáročnějších prostředí na naší planetě jsou přístupná pouze čtyřnohým zvířatům, ale zůstávají mimo dosah autonomních strojů. Nožní lokomoce může dramaticky rozšířit působnost robotiky v přirozeném prostředí. Doposud známé konvenční řadiče pro nožní lokomoci jsou založeny na propracovaných stavových automatech, které explicitně spouštějí provádění pohybových primitiv a reflexů. Tyto návrhy řadičů byly složité a stále nedosahovaly obecného a složitého zvířecího pohybu. Nyní byl však představen radikální robustní řadič pro nožní lokomoci v náročných přírodních podmínkách. Jde o nové řešení začlenění proprioceptivníPropriocepce – polohocit, schopnost vnímat polohu a pohyb vlastního těla, systému nebo jeho částí bez vnějších senzorů. Tato schopnost zahrnuje vnímání svalového napětí, pohybu kloubů a rovnováhy, což je umožněno pomocí vnitřních senzorů, jako jsou receptory ve svalech, kloubech a šlachách. U člověka je propriocepce nezbytná pro správnou koordinaci pohybu, registraci změny polohy těla atd. zpětné vazby do řízení lokomoce. Řadič je vyškolen z náročných učících simulací, založených na proudu proprioceptivních signálů a následné odezvě neuronové sítě. Vyškolený kontrolér byl implementován do dvou generací čtyřnohých robotů typu ANYmal, kteří se nacházeli v různých přírodních prostředích. Kontrolér zachovává svojí robustnost i za podmínek, s nimiž se během tréninku nesetkal. Příklady jsou: deformovatelný terén (jako je bláto a sníh), dynamické opěrné body (jako jsou sutiny) a nadzemní překážky (jako je hustá vegetace a tryskající voda). Algoritmus otevírá nové hranice pro robotiku a ukazuje, že radikální robustnosti v přírodním prostředí lze dosáhnout tréninkem v mnohem jednodušších oblastech.
Čtyřnohá schopnost robota dokáže zdolávat mnoho překážek v přirozeném
prostředí.
Zdroj: ANYbotics.
Voda a roboti se obvykle nemíchají… Naštěstí to není případ ANYmala, autonomní
stroj v přírodním prostředí, který může být prakticky kdekoliv! Zdroj: ANYbotics.
Komunita ANYmal Research vyvíjí a sdílí software a další informace s cílem zlepšit a rozšířit možnosti robotů. Roboti musí porozumět fyzickému světu, orientovat se v něm a integrovat se do složitého reálného prostředí. K testování a úspěchu v nestrukturovaném a rozmanitém prostředí potřebují výzkumní pracovníci v oblasti robotiky praktický, vhodný a připravený systém, který je schopen zvládnout náročné podmínky. Jako čtyřnohý robot má ANYmal výhody z univerzálního čtyřnohého pohybu kombinujícího stabilitu v nerovném terénu a vysokou dynamičnost pohybů, jako je například běh. Platforma robotů ANYmal poskytuje rozšiřitelnou softwarovou a hardwarovou architekturu, která pomůže uživatelům při plnění jejich úkolů v prostředí složitých průmyslových zařízení, nebezpečných podzemních prostor, až po přirozený nestrukturovaný terén.

Robot ANYmal se sám vyhýbá spadlým překážkám na podlaze. Zdroj: Anybotics.
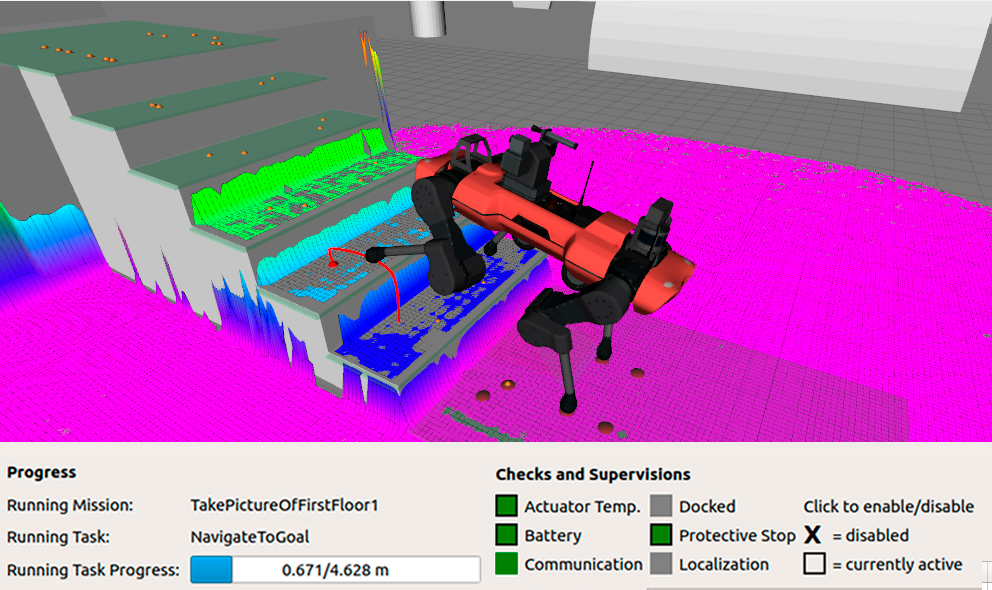
ANYmal – hledání nejkratší cesty pro mise s jedním nebo více cíli, vyhýbání se překážkám v reálném čase pro bezpečnou navigaci v dynamickém prostředí a plánování kroků k dosažení cíle. Zdroj: Anybotics.
ANYmal C – další krok
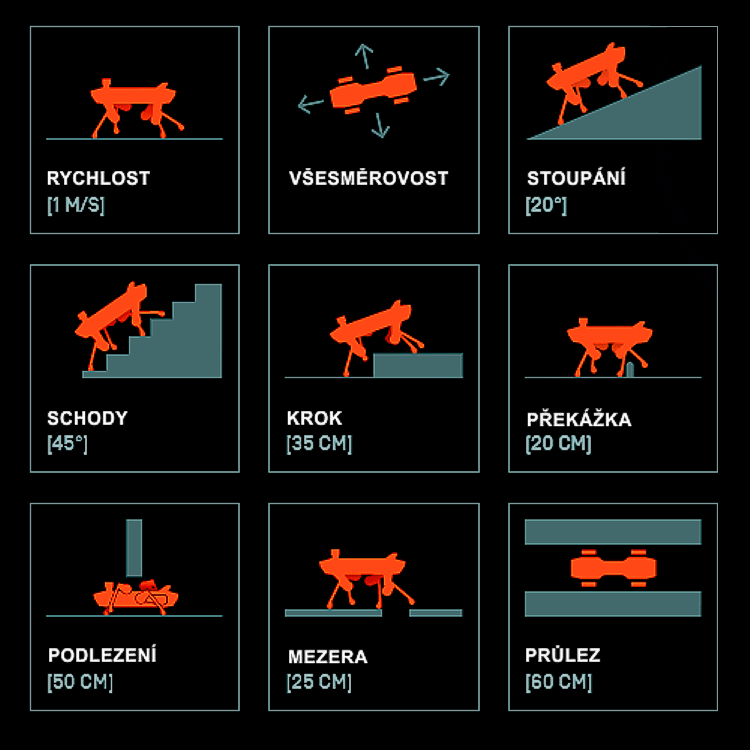
Tým Anybotics staví roboty s nohama více než deset let a vyvinul novou generaci čtyřnohého robota s názvem ANYmal C. Robot je postaven na vynikající mobilitě čtyř nohou. ANYmal C se může pohybovat průmyslovým prostředím včetně schodů, bez nutnosti jakýchkoliv úprav zařízení. Silné momentové ovladatelné pohony jsou navrženy tak, aby mohly přenést robota po strmých schodech, a spolehlivě tuto namáhavou práci zvládnou něco přes milion cyklů. LIDARLIDAR – Light-Imaging Detection and Ranging, detekce a určování vzdálenosti za pomoci laseru. Jde o metodu zjišťování vzdálenosti a vlastností objektu na základě analýzy rozptýleného světla laseru. Analogií v rádiovém oboru jsou radary. Vzdálenost objektu se určí z časové prodlevy odraženého signálu. Lidary se využívají hojně v geologii, seismologii a při sledování vlastností atmosféry. a hloubkové kamery umožňují detailní pohled na prostředí, ve kterém se robot nachází, a to v rozsahu plných 360°. Teleoperaci zjednodušují integrované širokoúhlé kamery a průmyslové dálkové ovládání. Šestijádrový procesor I7 poskytuje výpočetní výkon pro pokročilé ovládání lokomoce, mapování v reálném čase, autonomní navigaci a sofistikované vlastní aplikace. Všechny tyto funkce jsou uzavřeny v uživatelsky přívětivém, robustním a plně vodotěsném a prachotěsném provedení standardu IP67. ANYmal C unese užitečné zatížení až 10 kg a po dvou hodinách provozu na jedno nabití baterie se robot autonomně připojí k dokovací stanici pro dobití.

ANYmal C, vyvinutý pro automatizovanou průmyslovou kontrolu, je vybaven modulem kontroly otáčení a naklánění s vizuální a termovizní kamerou a LED reflektorem. Zdroj: Anybotics.
Dokovací stanice – integrovaná baterie umožňuje nepřetržitý provoz po dobu dvou až čtyř hodin v závislosti na aktivitě. Pro dobíjení se robot připojuje k dokovací stanici bez zásahu obsluhy. V případě potřeby lze baterii také snadno vyměnit za plnou bez použití nářadí. Zdroj: Anybotics.
Rozšiřitelná programová architektura založená na ROS
Simulační software pro ANYmala umožňuje výzkumným pracovníkům rychle a pružně ověřovat nové přístupy a koncepty. FrameworkFramework – aplikační rámec. Softwarová struktura, která slouží jako podpora při programování a vývoji a organizaci jiných softwarových projektů. Může obsahovat podpůrné programy, knihovny API, podporu pro návrhové vzory nebo doporučené postupy při vývoji. vychází z fyzikálního simulátoru Gazebo (Altán) a je plně kompatibilní s robotickým operačním systémem (ROSROS – robotický operační systém neboli robotický middleware (tj. kolekce softwarových frameworků pro vývoj softwaru robotů). Ačkoli ROS není operační systém, poskytuje služby určené pro heterogenní počítačový klastr, jako jsou abstrakce hardwaru, ovládání zařízení na nízké úrovni, implementace běžně používaných funkcí, předávání zpráv mezi procesy a správa balíčků.). Obsahuje uživatelské rozhraní a bohatou sadu nástrojů pro vizualizaci, logování a ladění (debugging). Nový student může přijít a zahájit výzkum na ANYmalovi téměř okamžitě.
Software ANYmala odhaduje stav, zpracovává údaje ze senzorů vnímání a obsahuje algoritmy řízení, navigace, mapování a lokalizace.Většina kódu je poskytována a sdílena jako zdrojový kód, proto mohou uživatelé upravit software podle svých potřeb. Tímto způsobem mohou vědci vyvinout složité a integrační algoritmy.
Laboratoře pro výzkum robotiky chtějí investovat většinu času do provádění experimentů, shromažďování a analýzy dat. Díky jednoduchému nastavení ANYmala, které vyžaduje pouze notebook, samotného robota a nabíječku baterií, můžete robota jednoduše zabalit a jít kamkoli, abyste provedli experimenty a shromáždili potřebná data.
Snadné testování vlastního softwaru v simulaci a na fyzickém robotu
(uživatelské rozhraní založené na RViz a RQT). Zdroj: Anybotics.
Rozšiřitelná hardwarová architektura
ANYmal slouží jako víceúčelová robotická platforma a je schopen řešit širokou škálu aplikací. Software je nejen propojen s celou řadou API, ale také představuje rozšiřitelnou hardwarovou architekturu, která umožňuje připojení dalších senzorů a různých nástrojů. Díky užitečné zátěži až 10 kg, vestavěným komunikačním a napájecím rozhraním a vyhrazenému palubnímu počítači je ANYmal C vybaven tak, aby zvládl jakýkoli úkol.
DARPA (Agentura ministerstva obrany pro pokročilé výzkumné projekty), zaměřená na provoz robotizace v podzemí, si připravila pro čtyřnohého robota nelehkou výzvu. Laboratoř Robotics Systems Lab, která je součástí curyšské ETHETH – prestižní švýcarská polytechnika, na které působil mj. Albert Einstein. Zkratka ETH znamená Eidgenössische Technische Hochschule (Spolková vysoká technická škola). Univerzita byla založena v roce 1855, nyní má dvě části: v Curychu (ETHZ) a v Laussane (ETHL). S univerzitou je spojeno 26 nositelů Nobelových cen., proto integrovala kamery a senzory, aby robot našel hledané artefakty. Na robota se celkem namontovalo užitečné zatížení v podobě dvou kilogramů měřicích senzorů, což umožnilo provést pro tento speciální projekt potřebná měření. Tým také pracuje na rozšíření manipulačních schopností robota pro úkoly dynamické interakce, jako je zvedání předmětů nebo otevírání dveří.
Kontrolní užitečné zatížení
Pro širokou škálu průmyslových inspekčních úkolů je užitečný modul, který nese vizuální a termo kamery a reflektor na výklopné jednotce. Vizuální kamera poskytuje desetinásobný optický zoom, který umožňuje pořizovat jasné snímky a videa na velké vzdálenosti. LEDLED – Light Emitting Diode, světlo emitující dioda. LED je polovodičová optoelektronická součástka, která emituje nekoherentní monochromatické světlo při průchodu proudu v propustném směru. Emise světla vzniká na základě elektroluminiscence. reflektor se používá k podpoře vizuální kamery za nedostatečných světelných podmínek. Termokamera poskytuje přesné údaje o teplotě v rozsahu od −20 do 500 °C bez fyzické interakce.

Modul, který nese vizuální a termokamery s reflektorem na výklopné jednotce.
Zdroj: Anybotics.
Grafická karta
Pro úkoly, kde je vyžadován masivní paralelní výpočet, je ANYmal C vybaven grafickou kartou NVIDIA Jetson AGX Xavier. To umožňuje provádět výkonné počítačové vidění a algoritmy hlubokého učení.
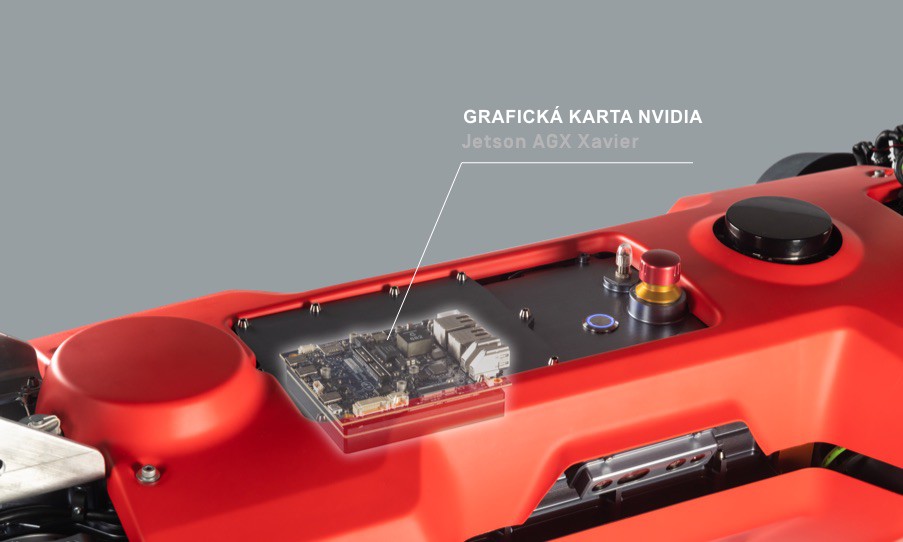
Grafická karta pro výkonné počítačové vidění a algoritmy hlubokého učení.
Zdroj: Anybotics.
Aplikační rozhraní
Aplikační rozhraní poskytuje přístup ke komunikačnímu a výkonovému rozhraní robota prostřednictvím utěsněných standardních zástrček (IP67). Modul je vybaven 48 V a regulovanými 12 V zdroji energie a přístupem k vestavěnému aplikačnímu počítači přes USB 2.0 a .0 a Ethernet (1 Gbps). Rozhraní aplikace umožňuje zjednodušené připojení vlastních užitečných dat, ale obecně se pro integraci užitečných dat nevyžaduje.
S novým aplikačním rozhraním ANYmala C mají výzkumní uživatelé přístup k vestavěnému aplikačnímu počítači robota, který jim umožňuje vyvíjet vlastní užitečné zatížení. Systém rozhraní podporuje mechanické zátěže, externí užitečné zátěže a několik vodotěsných zástrček pro napájecí a komunikační rozhraní (USB a Ethernet).
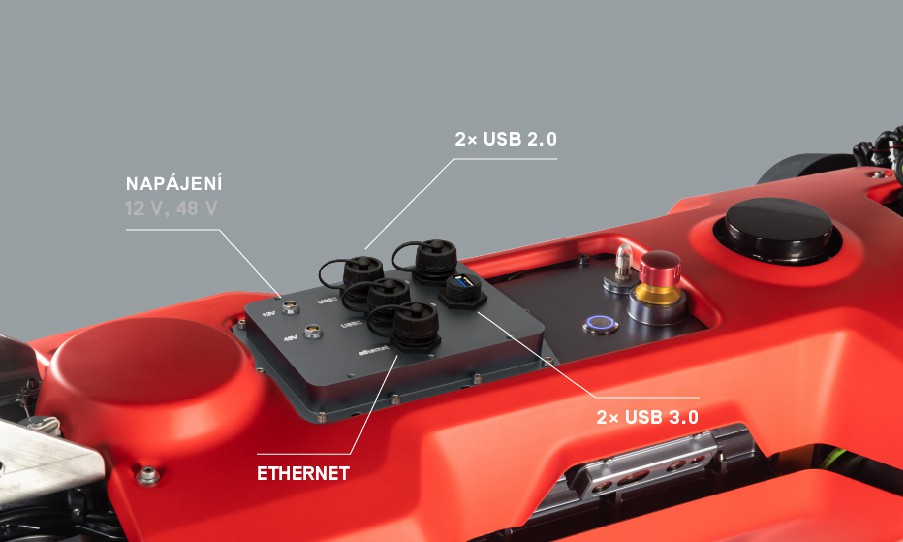
Nové napájecí a komunikační rozhraní pro další vývoj užitečného zatížení.
Zdroj: Anybotics.
Očekávaný průmyslem
Energetický, ropný, plynárenský, zpracovatelský a mnoho dalších průmyslových odvětví netrpělivě očekávají mobilní robotická řešení pro zlepšení bezpečnosti a efektivity jejich provozu. Vzhledem k jejich vysoké složitosti je obtížné provozovat průmyslová zařízení bez poruch a kvůli vysokým nákladům na prostoje se provozovatelé zařízení velmi snaží zabránit jejich výpadkům. Aby se zabránilo selhání zařízení, je třeba továrnu pravidelně monitorovat a kontrolovat. Manuální shromažďování dat lidskými inspektory je v potenciálně nebezpečném prostředí velmi zdlouhavý proces, navíc náchylný k chybám. I když jsou části zařízení snímány, je obtížné detekovat vady, jako jsou netěsnosti, rez, horká místa nebo chybějící součásti zařízení. Z tohoto důvodu autonomní mobilní roboti zásadně změní inspekční strategii provozovatelů a v budoucnu umožní být součástí tovární architektury.

Provádění autonomní rutinní kontroly ANYmalrm C umožňuje provozovatelům bezpečně a spolehlivě shromažďovat a interpretovat data z různých zařízení a okolního prostředí. Zdroj: Anybotics.
Závěr
ANYmal C je průkopnický systém připravený k testování v průmyslových zařízeních. Společnost ANYbotic poskytuje testovací instalace a pilotní projekty po celém světě, aby si budoucí zákazníci vyzkoušeli potenciál autonomní robotické inspekce a připravili se na zcela bezobslužné instalace v budoucnosti. ANYmal C je k prodeji vývojovým zákazníkům, inženýrským partnerům a univerzitám včetně kompletního softwarového a simulačního prostředí. Máte-li zájem ohledně objednávek čtyřnohého Anymala C, obraťte se na ANYbotics na adrese www.anybotics.com.
Odkazy
- Joonho Lee et al.: Learning Quadrupedal Locomotion over Challenging Terrain; Science Robotics 5/47, 2020
- ANYbotics: ANYmal C – The Next Step in Robotic Industrial Inspection; ANYbotics News, 20 Aug 2019
- ANYbotics: ANYmal, a Cutting-Edge Legged Robot Platform to Advance Robotics Research; ANYbotics News, 3 Jun 2020
- ANYbotics: First ANYmal C Legged Robot Customer Deliveries; ANYbotics News, 16 Jun 2020
- ANYbotics: ANYbotics Brings an Innovative Approach to Construction Safety; ANYbotics News, 20 Oct 2020
- ANYbotics: ANYbotics Announces CHF 20M Series A; ANYbotics News, 3 Dec 2020
- ANYbotics: Gallery
- Wikipedie: Autonomie
- Wikipedie: Lokomoce živočichů
- Wikipedie: Lokomoce člověka
- Wikipedie: Framework
- Wikipedia: Robot Operating System
- Wikipedia: Lidar
- Wikiskripta: Propriocepce
![]()
![]()
