|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Měkký robotí hmyz přežije úder plácačkou
Petr Panchártek
Vědci ze Švýcarského federálního technologického institutu v Lausanne (EPFLEPFL – École Polytechnique Fédérale de Lausanne, Švýcarský federální technologický institut v Lausanne. Jde o výzkumnou univerzitu ve švýcarském Lausanne, jejíž kořeny sahají do roku 1853. Má přes 12 500 studentů (2022). Řadí se do první dvacítky nejprestižnějších univerzit světa.) vyvinuli ultralehký robotický hmyz, který používá své měkké umělé svaly k pohybu rychlostí tři centimetry za sekundu napříč různými typy terénů. Může být zohýbán nebo drcen, a přesto bude schopný pokračovat v pohybu.

Měkký robotický hmyz prohledává místní okolí. Zdroj: EPFL.
|
Nanotechnologie – obor zabývající se aplikováním výsledků nanofyziky. Zkoumá možnosti, jak vytvářet zařízení molekulových rozměrů a jak manipulovat s jednotlivými atomy tak, aby se dosáhlo žádaných vlastností. Protože u zařízení vyrobených pomocí nanotechnologie můžeme jejich činnost předurčit polohou a druhem jednotlivých atomů, můžeme dosáhnout maximální účinnosti, efektivity a výkonu, při dodržení malých rozměrů. Aktuátor – elektrostatický nebo hydraulický prvek. Takové prvky se využívají jak v nanotechnologiích, tak v klasických technologiích. V nanotechnologiích převádí prvek zaslanou informaci na mechanickou akci. V makrosvětě jde například o systém aktivní optiky – pod zrcadlem je sada aktuátorů, která kompenzuje jeho tvarové změny v závislosti na řídícím signálu. Podmínkou je, aby změny tvaru zrcadla probíhaly s vyšší frekvencí než změny v obrazu, který je korigován. EPFL – École Polytechnique Fédérale de Lausanne, Švýcarský federální technologický institut v Lausanne. Jde o výzkumnou univerzitu ve švýcarském Lausanne, jejíž kořeny sahají do roku 1853. Má přes 12 500 studentů (2022). Řadí se do první dvacítky nejprestižnějších univerzit světa. |
Autonomní navigace
Představte si roj robotického hmyzu, který se pohybuje okolo nás a plní při tom určité úkoly. Může to znít jako sci-fi, ale ve skutečnosti je to pravděpodobnější, než si myslíte. Hmyz je pro robotiky stálým zdrojem inspirace. Poddajná těla umožňují hmyzu protlačit se malými otvory a být vysoce odolný vůči nárazům. Dlouhodobou výzvou robotiků je vytvořit měkké roboty s hmotností pod jeden gram, nezávislé na napájecích vodičích a schopné inteligentně reagovat na okolní prostředí. Jednou z překážek je nízká hustota výkonu měkkých pohonů (aktuátorůAktuátor – elektrostatický nebo hydraulický prvek. Takové prvky se využívají jak v nanotechnologiích, tak v klasických technologiích. V nanotechnologiích převádí prvek zaslanou informaci na mechanickou akci. V makrosvětě jde například o systém aktivní optiky – pod zrcadlem je sada aktuátorů, která kompenzuje jeho tvarové změny v závislosti na řídícím signálu. Podmínkou je, aby změny tvaru zrcadla probíhaly s vyšší frekvencí než změny v obrazu, který je korigován.), což vedlo k tomu, že drobní roboti nejsou schopni nést svou snímací a řídící elektroniku a napájecí zdroj. Vědci z technologického institutu EPFLEPFL – École Polytechnique Fédérale de Lausanne, Švýcarský federální technologický institut v Lausanne. Jde o výzkumnou univerzitu ve švýcarském Lausanne, jejíž kořeny sahají do roku 1853. Má přes 12 500 studentů (2022). Řadí se do první dvacítky nejprestižnějších univerzit světa. vyvinuli měkký robotický hmyz, který se pohybuje rychlostí tři centimetry za sekundu.
Měkký robotický hmyz, který leze po listu. Zdroj EPFL.
Měkcí roboti o velikosti jednoho centimetru až po velikost jednoho decimetru, mají dnes dvě hlavní omezení. Malá síla a malá hustota výkonu většiny měkkých pohonů znamená, že jen málo lehkých robotů může nést vlastní napájení, a proto musí být připojeni vodiči na zdroj energie.
Tým vyvinul dvě verze měkkého robota nazvaného DEAnsect. První z nich je tzv. „přivázaný“ za použití ultratenkého vodiče a je velice robustní. Může být zohýbán, zasažen plácačkou nebo přišlápnut botou, aniž by to ovlivnilo jeho schopnost pohybu. Druhý je tzv. „nevázaný“, který je plně bezdrátový a autonomní. Váží méně než jeden gram a nosí na zádech baterii a všechny elektronické součásti. Tento inteligentní hmyz je vybaven mikrokontrolérem, který nahrazuje mozek a fotodiodami nahrazujícími oči. Fotodiody slouží pro rozpoznání černých a bílých vzorů, což DEAnsectovi umožní sledovat jakoukoli čáru nakreslenou na zemi.
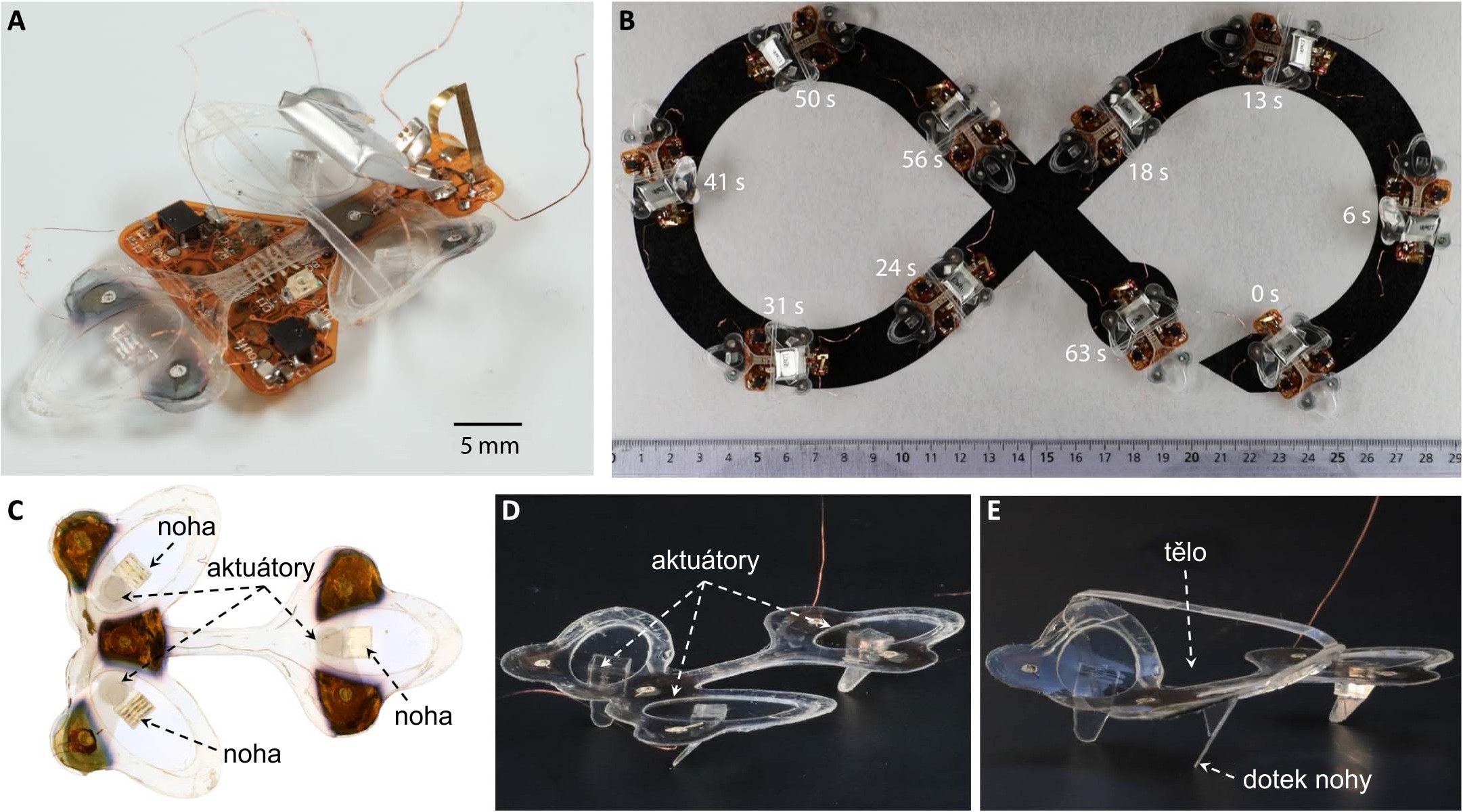
(A) Fotografie autonomního „nevázaného“ robota poháněného třemi aktuátory, který nese své ovládací a výkonové prvky, o celkové hmotnosti 970 mg. (B) Snímky „nevázaného“ DEAnsecta, který autonomně sleduje cestu ve tvaru číslice 8 a automaticky se zastaví na konci cesty. Pravítko je v centimetrech. Celkový uplynulý čas je 63 s (viz film níže). (C až E) Měkký robot využívající tři aktuátory k ovládání tří nezávislých noh na základě asymetrického třecího pohonu. (C) Pohled shora: Fotografie plochého (vyrobeného) robota DEAnsecta. (D) Fotografie plochého robota DEAnsecta z boku. (E) Boční pohled na deformovaný DEAnsect s tělem drženým v ohnutém tvaru pomocí pásky. Nosnost deformovaného DEAnsecta je zlepšena zvýšenou tuhostí. DEAnsect je plně mobilní jak v ploché, tak v deformované konfiguraci. Zdroj: Science Robotics.
Řídící mikrokontrolér a dvě fotodiody umožňují autonomní sledování cesty a řízení DEAnsecta tak, aby zůstal na černé ploše. DEAnsect se zastaví, když jsou obě fotodiody na bílém povrchu. Integrovaná baterie umožňuje nepřetržitý provoz po dobu přesahující 14 minut. Zdroj: Science Robotics.
Vibrační pohon
DEAnsect je vybaven dielektrickými elastomerními aktuátoryAktuátor – elektrostatický nebo hydraulický prvek. Takové prvky se využívají jak v nanotechnologiích, tak v klasických technologiích. V nanotechnologiích převádí prvek zaslanou informaci na mechanickou akci. V makrosvětě jde například o systém aktivní optiky – pod zrcadlem je sada aktuátorů, která kompenzuje jeho tvarové změny v závislosti na řídícím signálu. Podmínkou je, aby změny tvaru zrcadla probíhaly s vyšší frekvencí než změny v obrazu, který je korigován. (DEA), což je typ umělého svalu tenký jako vlas, který jej pohání dopředu prostřednictvím vibrací. Tyto aktuátory jsou hlavním důvodem, proč je hmyz tak lehký a rychlý. Rovněž mu umožňuje pohybovat se po různých typech terénu, včetně zvlněných povrchů.

Detail měkkého hmyzu. Zdroj: EPFL.
Umělé svaly jsou složeny z elastomerní membrány vložené mezi dvě měkké elektrody. Když je na tyto elektrody přivedeno napětí, tak se stlačováním membrány začnou elektrody přitahovat k sobě. Po vypnutí napětí se membrána vrátí do svého původního tvaru. Hmyz má takové svaly připevněné na každé ze svých tří nohou. Pohyb je generován velmi rychlým zapínáním a vypínáním napětí s frekvencí vyšší než čtyřistakrát za sekundu.
Aktuátory DEA jsou založeny na elektrostatických elektroaktivních polymerech. Umožňují provoz v kilohertzech a vysokou hustotou výkonu, ale k dosažení plného výkonu je potřeba napětí několik kilovoltů. Hmotnost kilovoltového zdroje bohužel omezuje rychlost a výkon robotického hmyzu. Tým ale použil nanotechnologie, které dovolily umělým svalům pracovat při relativně nízkém napětí. Tloušťka elastomerní membrány se zúžila a technologie umožnila vyvinout vysoce vodivé elektrody o tloušťce jen několika molekul. Tento chytrý design dovolil vědcům dramaticky zmenšit zdroj energie.
Nanotechnologie umožnily vytvořit nízkonapěťové skládané aktuátory LVSDEA (Low Voltage Stacked Dielectric Elastomer Actuators) s provozním napětím pod 450 voltů. Tento zdroj se použil jako pohon měkkého „nevázaného“ autonomního robota s délkou nožiček o velikosti hmyzu (40 mm). Tělo tvoří tři aktuátory LVSDEA, které řídí jeho tři nohy. Celé tělo váží 190 miligramů a může nést užitečnou váhu 950 miligramů, což je pětinásobek jeho tělesné hmotnosti. Nezatížený DEAnsect se pohybuje rychlostí tři centimetry za sekundu a je velice robustní. Provozní napětí pod 500 voltů umožnilo vyvinout pohonnou elektroniku o hmotnosti 780 mg, včetně optických senzorů, mikrokontroléru a baterie se dvěma výstupy 450 voltů s frekvencí až jeden kilohertz. Integrací této flexibilní desky plošných spojů do DEAnsecta se vyvinul robot lehčí než jeden gram, který je schopný autonomní navigace, tj. nezávisle sledovat tištěné trasy.
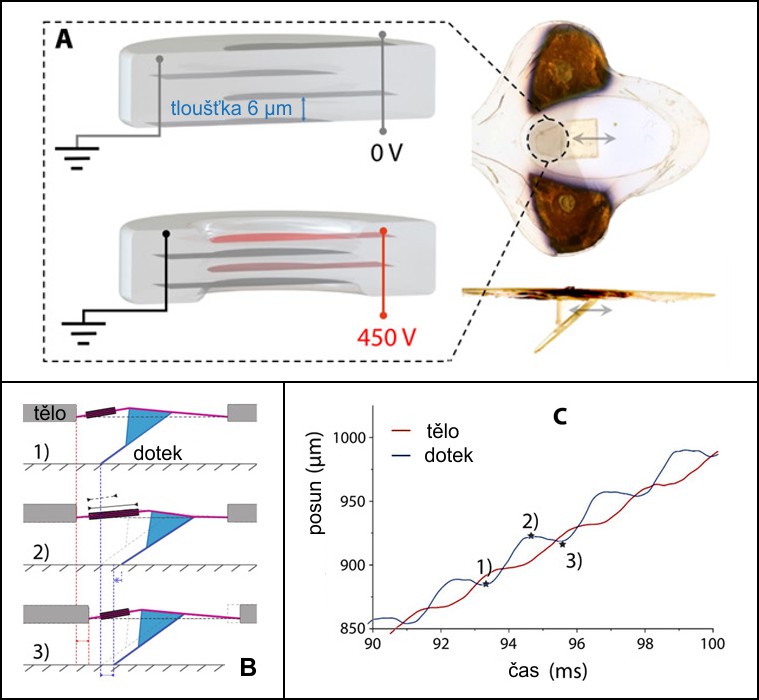
(A) Schematický průřez a princip funkce aktuátorů LVSDEA, které jsou 18 µm tlusté, sestávají ze tří vrstev 6 µm tlustých membrán střídajících se s čtyřmi vrstvami ultratenkých elektrod. Přivedení napětí vede ke kompresi mimo rovinu a k expanzi v rovině. Řídící signál 450 V aktivuje aktuátor a pohybuje odpovídající nohou. Fotografie odpovídají jedné robotické noze z různých pohledů (vpravo nahoře, shora a vpravo dole, profil). (B) Zjednodušená schémata pohybu těla a nohy robota. Když se aktuátor roztáhne, noha se posune dopředu. Když se aktuátor stahuje, noha zůstává téměř statická kvůli směrovému tření a tělo robota se sune vpřed. (C) Naměřený graf posunutí těla a nohy robota jako funkce času, extrahovaný z videa z vysokorychlostní kamery (viz následující klip) poté, co robot dosáhl stálého pohybu. Průměrný krok vpřed je 40 mikrometrů, což odpovídá rychlosti vpřed 18 milimetrů za sekundu. Zdroj: Science Robotics.
Počáteční animace zobrazuje princip pohybu. Následují
skutečné záběry na tělo
a nohu DEAnsecta z vysokorychlostní kamery.
Zdroj: EPFL/Science Robotics.
Budoucnost
Tato technika otevírá nové možnosti pro široké využití nových aktuátorů v robotice, například pro vytvoření roje inteligentního robotického hmyzu sloužícího pro kontroly nebo vzdálené opravy různých zařízení. V principu by bylo možné robota poslat i do hmyzí kolonie, se kterou by žil, a přispěl tak k hlubšímu porozumění kolektivního chování hmyzu. V současné době spolupracuje tým z EFPL na „nevázaných“ a zcela měkkých verzích robotického hmyzu se Stanfordovou univerzitou. V dlouhodobějším horizontu se plánuje montáž takových senzorů a vysílačů, které umožní komunikaci jednotlivých hmyzích jedinců mezi sebou.
Zásah DEAnsecta plácačkou na mouchy. Zdroj: EPFL.
Odkazy
- Herbert Shea, Xiaobin Ji: A soft robotic insect that survives being flattened by a fly swatter; EPFL News, 18 Dec 2019
- Xiaobin Ji et al.: An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators; Science Robotics 4/37, 18 Dec 2019
- Petr Panchártek: Inteligentní mikroroboti; AB 7/2019
![]()
![]()
