|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Dotek roboreality
Radek Beňo
Moderní robotika se v posledním dvacetiletí řítí kupředu nezadržitelným tempem. V Japonsku hrají roboti na housle, v americkém Bostonu zase běhají robotická zvířata a po povrchu MarsuMars – rudá planeta se dvěma malými měsíci, Phobosem a Deimosem, je v pořadí čtvrtým tělesem Sluneční soustavy. Povrch planety je pokryt načervenalým pískem a prachem. Barva je způsobena vysokým obsahem železa. Načervenalá barva celé planety jí dala jméno (Mars je bůh válek). Na povrchu se nacházejí obrovské sopky, z nichž ta největší, Olympus Mons, je 22 km vysoká a její základna je 600 km široká. Na vrcholu je kráter o průměru 72 km. Pro Mars jsou charakteristické systémy kaňonů vzniklé pohybem kůry. Snímky ze sond ukazují místa, kudy dříve tekla voda. Zdá se, že Mars byl dříve vlhčí a teplejší, než je dnes. Rozpětí teplot, které na Marsu panují (zima není větší než v Antarktidě) by bylo snesitelné pro některé primitivní formy života žijící na Zemi. Jejich existence se však dosud nepotvrdila. Mars má tekuté jádra a pevné jadérko, které bylo objeveno v roce 2025. se prohání „kuriózní“ Curiosity, roverRover – automatické vozítko schopné vlastního pohybu určené k výzkumu těles slunenčí soustavy. Rovery využívá především NASA k výzkumu Marsu., který je spíše mobilní vědeckou laboratoří, než pouze mobilním robotem. Všechno je přitom pouze „kusem železa“, které ožívá právě díky unikátním myšlenkám a šikovné, občas až titěrné inženýrské práci. S dalším přelomovým objevem, tentokráte na poli jemné robotické motoriky, přišli mladí vědci ze Švýcarského federálního technologického institutu v Lausanne (EPFL). Jejich robotické prsty dokáží zvednout a držet takřka jakýkoliv předmět. Předmět je uchopen silikonovým povrchem za pomoci elektroadhezeElektroadhezní síla – přitažlivá síla na rozhraní dvou těles, které jsou vystaveny působení elektrického pole. Jedno z těles může obsahovat elektrody, za jejichž pomoci se na obou površích indukuje opačný elektrický náboj, který drží tělesa elektrostatickou silou pospolu.. Nezáleží přitom na tvaru předmětu ani na jeho materiálovém složení. Držení předmětu je mnohem účinnější než u dnes běžně používaných podtlakových přísavek.
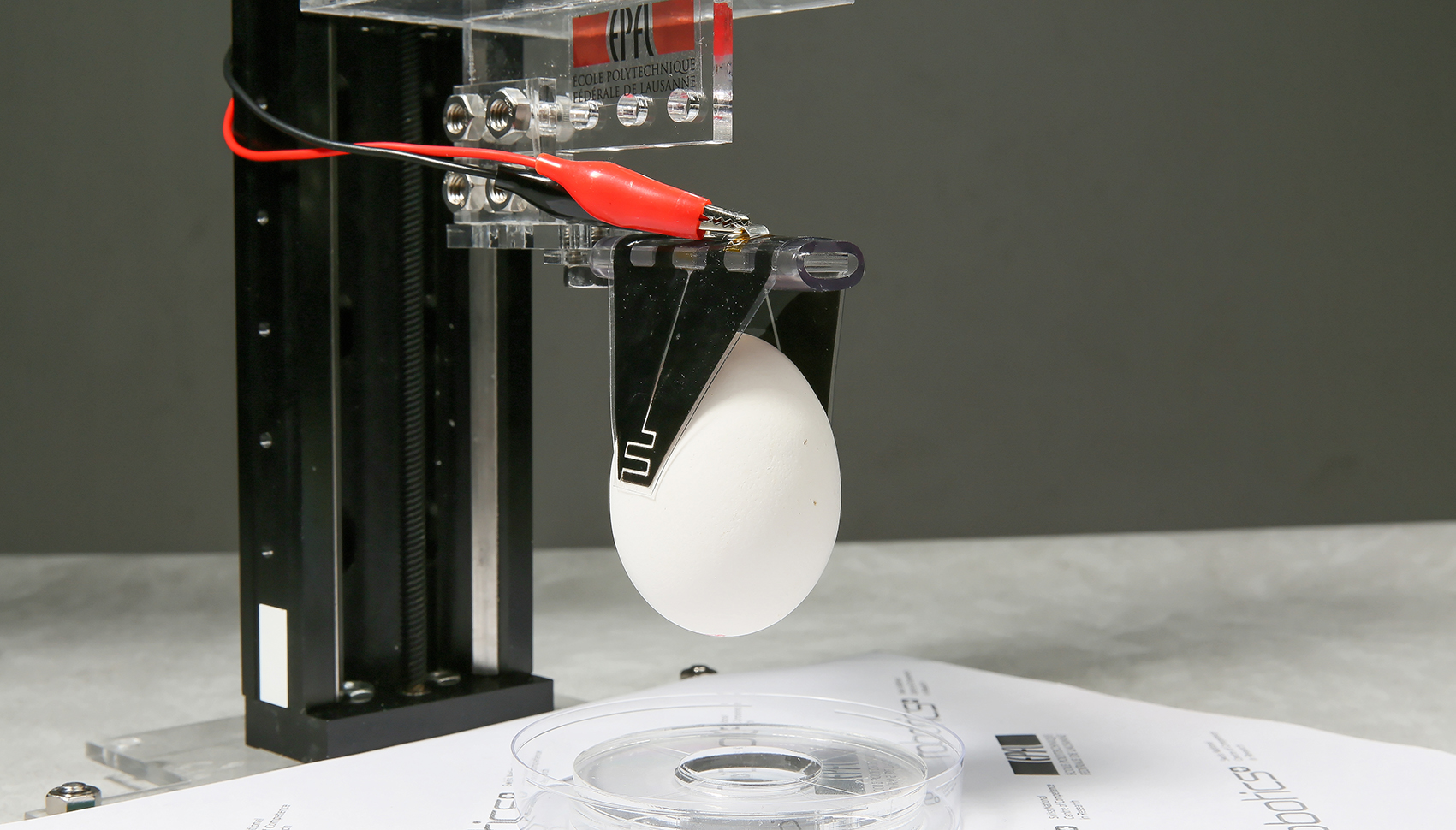
Robotické prsty v akci. Zdroj: EPFL.
|
Kohezní síla – přitažlivá síla mezi stejnými molekulami, která je způsobena nerovnoměrným rozložením náboje v molekule a jeho prosakováním mimo molekulu. Nevyrovnané kohezní síly na povrchu kapaliny způsobují povrchové napětí. Adhezní síla – přitažlivá síla mezi různými molekulami, která působí napříč rozhraní, zpravidla mezi kapalinou a pevnou látkou. Je způsobena nerovnoměrným rozložením náboje v molekule a jeho prosakováním mimo molekulu. Elektroadhezní síla – přitažlivá síla na rozhraní dvou těles, které jsou vystaveny působení elektrického pole. Jedno z těles může obsahovat elektrody, za jejichž pomoci se na obou površích indukuje opačný elektrický náboj, který drží tělesa elektrostatickou silou pospolu. |
Manipulace s objekty je nejběžnější úlohou, kterou lze v průmyslové robotice najít. A pokud se neomezíme pouze na průmysl, je to pravda taky. Největším problémem, se kterým se při instalaci konkrétního manipulátoru inženýři potýkají, je přizpůsobení uchopovacího mechanismu tvaru, popřípadě velikosti uchopovaného objektu. Právě tyto nevýhody dokázal odstranit pomocí svého objevu mladý doktorand švýcarského EPFL, Jun Shitake.
Všechno je založeno na kombinaci elektrostatické síly a ohebných silikonových prstů, které mají na koncích integrované elektrody. Samotná elektroda přitom musí být ohebná stejně, jako zbytek „ruky“. Je proto konstruována z napnuté vrstvy elastomeru, která je vložena mezi dvě vrstvy elektrod a dvě vnější vrstvy silikonu různé tloušťky. Při vypnutém napájení je membrána zkroucená právě díky různé tloušťce vnějších vrstev. Přivedením napětí na elektrody dochází k narovnávání membrány, čímž se simuluje činnost svalů lidských prstů. Po sepnutí napájení elektrod vznikne elektrostatické pole, díky němuž se na oba povrchy přesunou náboje. „Prsty“ pak k předmětu elektrostaticky přilnou. Jedná se o stejný princip, jako bychom si ve vlasech třeli nafukovací balónek a poté ho díky elektrostatice přichytili ke zdi. Tímto způsobem dokážou elektrody udržet i předmět, jehož hmotnost je rovna více než osmdesátinásobku hmotnosti robotických prstů.
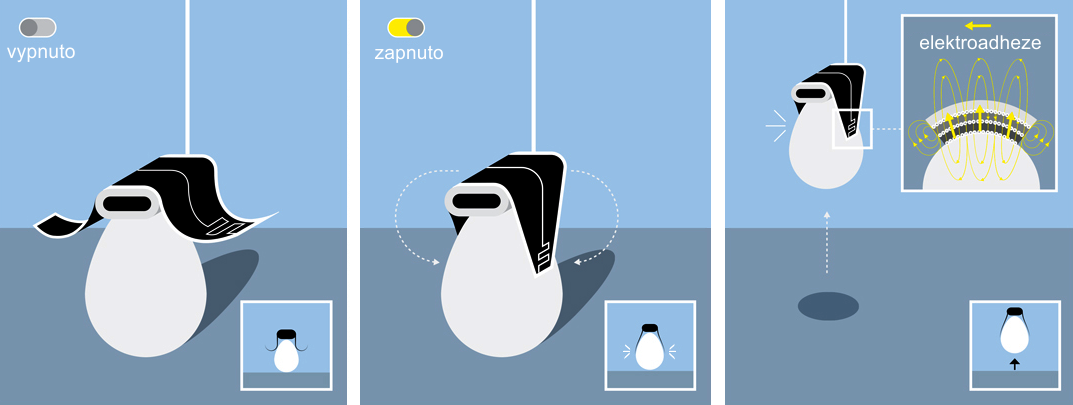
Princip funkce silikonových prstů. 1) „chapadlo“ se přiblíží k objektu. 2) po zapnutí napájení elektrod dojde díky vyvinutému elektrostatickému poli k přilnutí „prstů“ k objektu. 3) objekt je zdvižen. Na tvaru objektu přitom nezáleží, zvedat lze bez problémů vajíčko stejně dobře, jako například papír. Po vypnutí napájení se prsty vrátí do výchozí polohy. Zdroj: EPFL.
Závěr
Bezesporu největší výhodou těchto robotických prstů je jejich flexibilita a malá celková hmotnost při poměrně nenáročné ceně jejich výroby. Jako sekundární výhody lze zmínit malou energetickou a prostorovou náročnost. Využití je přitom očekáváno na celém poli robotiky a zejména pak tam, kde je hmotnost zařízení rozhodující vlastností, tedy u družic a nebo například u v současné době velmi oblíbených létajících dronů, kde by bylo téměř nereálné k uchopení využívat konvenční robotická ramena. Velmi dobrého uplatnění se lze dočkat i v potravinářském průmyslu, kde se zase velmi často setkáváme s různorodým tvarem manipulovaného objektu.
Roboprsty. Vytvořeno podle materiálů EPFL. (mp4/h264, 7 MB)
Odkazy
![]()
![]()
