|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
MRO - Další průzkumník Marsu
Jiřina Hrušová
Sonda MRO (Mars Reconnaissance Orbiter, Průzkumná oběžnice Marsu) byla vyvinuta za účelem získání detailních informací o vybraných místech na MarsuMars – rudá planeta se dvěma malými měsíci, Phobosem a Deimosem, je v pořadí čtvrtým tělesem Sluneční soustavy. Povrch planety je pokryt načervenalým pískem a prachem. Barva je způsobena vysokým obsahem železa. Načervenalá barva celé planety jí dala jméno (Mars je bůh válek). Na povrchu se nacházejí obrovské sopky, z nichž ta největší, Olympus Mons, je 22 km vysoká a její základna je 600 km široká. Na vrcholu je kráter o průměru 72 km. Pro Mars jsou charakteristické systémy kaňonů vzniklé pohybem kůry. Snímky ze sond ukazují místa, kudy dříve tekla voda. Zdá se, že Mars byl dříve vlhčí a teplejší, než je dnes. Rozpětí teplot, které na Marsu panují (zima není větší než v Antarktidě) by bylo snesitelné pro některé primitivní formy života žijící na Zemi. Jejich existence se však dosud nepotvrdila. Mars má tekuté jádra a pevné jadérko, které bylo objeveno v roce 2025.. Tým amerických vědců z NASANASA – National Aeronautics and Space Administration, americký Národní úřad pro letectví a kosmonautiku, byl založen prezidentem Eisenhowerem 29. července 1958. Jde o instituci zodpovědnou za kosmický program USA a dlouhodobý civilní i vojenský výzkum vesmíru. K nejznámějším projektům patří mise Apollo, která v roce 1969 vyvrcholila přistáním člověka na Měsíci, mise Pioneer, Voyager, Mars Global Surveyor a dlouhá řada dalších. si tentokrát vybral jednak geologicky zajímavá místa a jednak místa, která by v budoucnosti mohla sloužit jako přistávací plochy. Jedním z hlavních cílů je hledání vody na Marsu a pozůstatků po jejím působení. Na sondě se nachází dosud největší kamera, která se kdy vydala k nějaké planetě. Měla by být schopna fotografovat z oběžné dráhy detaily velikosti desítek centimetrů. Takové rozlišení bylo dříve dosažitelné pouze ze sond, které přistály na povrchu.
Sonda úspěšně odstartovala 12. 8. 2005 v 11:43 UT, nosičem pro start byla raketa Atlas VAtlas V – nosná raketa NASA vyvíjena společností Boeing, od roku 2006 vyráběná společností United Launch Alliance. Celková výška Atlasu s druhým stupněm Centaur III je 60 m. Vzletová hmotnost je 333 000 kg. Připojením až pěti pomocných raketových motorů na tuhé palivo GEM 63 hmotnost vzroste až na 590 000 kg. První stupeň rakety Atlas V je poháněn jedním motorem RD-180 s tahem 3,8 MN a druhý stupeň – Centaur III je poháněn jedním motorem RL10C-1 o tahu 102 kN nebo dvěma motory RL10A-4-2 o celkovém tahu 198 kN.. Na oběžnou dráhu kolem Marsu byla úspěšně navedena dne 10. 3. 2006. První snímky z pracovní oběžné dráhy byly pořízeny 29. 9. 2006.
Plánovaný průběh letu
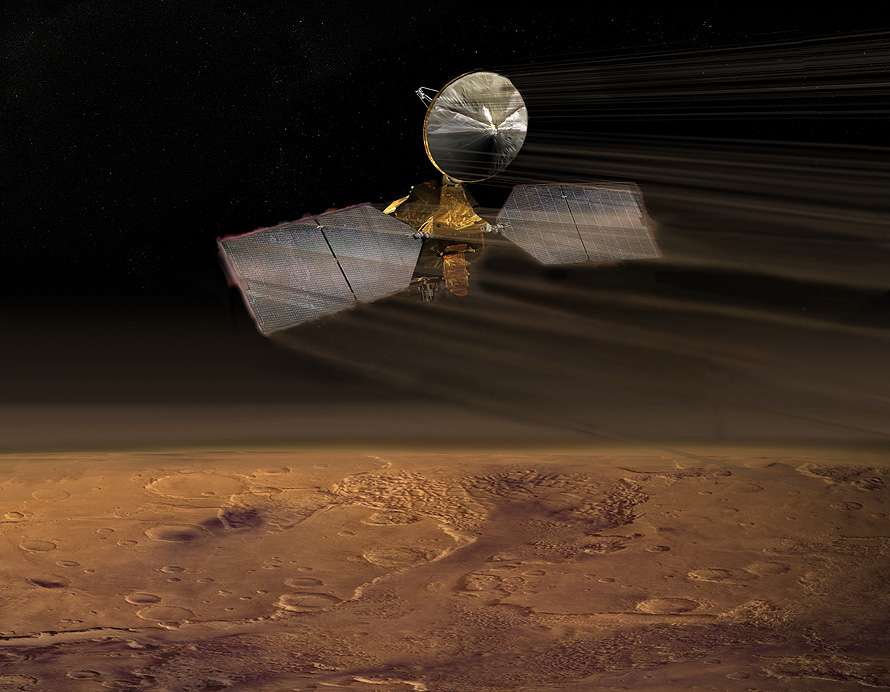

První obrázek znázorňuje brzdění sondy pomocí
atmosféry Marsu.
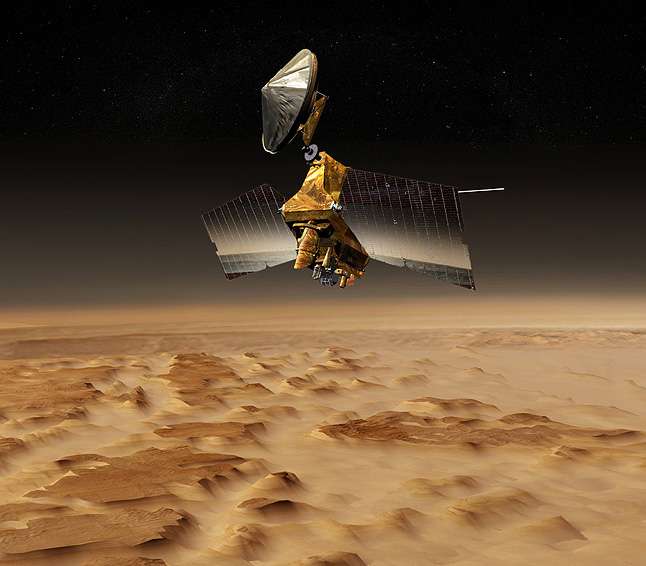
Na druhém a třetím obrázku vykonává sonda průzkumné práce.
Počáteční polární dráha byla excentrická elipsa s minimální výškou nad povrchem 300 km a maximální 45 000 km s oběžnou dobou 35 h. Tato dráha byla postupně během dalších šesti měsíců snížena brzděním o atmosféru (tzv. aerobraking) až na výšku 250 až 320 km. Konečná orbita je zvolena tak, aby oběžná doba odpovídala jedné dvanáctině rotační periody planety. Tím se dosáhlo toho, že sonda přelétá nad stejným místem ve stejnou dobu. Sběr dat bude probíhat od konce sluneční konjunkceKonjunkce – planeta a Slunce mají stejnou ekliptikální délku neboli rektascenzi. Při horní konjunkci je Slunce mezi Zemí a planetou. U vnitřních planet (Merkuru a Venuše) může nastat také dolní konjunkce, při níž je planeta mezi Zemí a Sluncem. v listopadu 2006 až do začátku příští konjunkce v listopadu 2008, což odpovídá jednomu roku na Marsu. Předpokládá se, že nejméně do konce roku 2010 bude sonda nadále využívána jako retranslační stanice dalších expedic k Marsu.
|
Mars – rudá planeta se dvěma malými měsíci, Phobosem a Deimosem, je v pořadí čtvrtým tělesem Sluneční soustavy. Povrch planety je pokryt načervenalým pískem a prachem. Barva je způsobena vysokým obsahem železa. Načervenalá barva celé planety jí dala jméno (Mars je bůh válek). Na povrchu se nacházejí obrovské sopky, z nichž ta největší, Olympus Mons, je 22 km vysoká a její základna je 600 km široká. Na vrcholu je kráter o průměru 72 km. Pro Mars jsou charakteristické systémy kaňonů vzniklé pohybem kůry. Snímky ze sond ukazují místa, kudy dříve tekla voda. Zdá se, že Mars byl dříve vlhčí a teplejší, než je dnes. Rozpětí teplot, které na Marsu panují (zima není větší než v Antarktidě) by bylo snesitelné pro některé primitivní formy života žijící na Zemi. Jejich existence se však dosud nepotvrdila. Mars má tekuté jádra a pevné jadérko, které bylo objeveno v roce 2025. MRO – Mars Reconnaissance Orbiter (Průzkumná oběžnice Marsu), sonda NASA, která získává detailní informace o vybraných místech na Marsu, zejména s ohledem na přítomnost vody v minulosti i v současnosti. Sonda startovala v srpnu 2005 a na oběžnou dráhu byla navedena v březnu 2006. Rozlišení je pouhých několik decimetrů. Od ledna 2009 slouží také jako retranslační stanice. V roce 2015 detekovala na Marsu tekoucí vodu. Aerobraking – způsob brzdění, který využívá tření atmosféry planety k pozvolnému sestupu kosmické lodi. Zpravidla se tohoto manévru využívá ke snížení výšky oběžné dráhy. |
Úkoly mise
Vědci chtějí hledat zvláštní typy hornin formovaných ve vlhkém prostředí. Radar umístěný na družici má mít schopnost sondovat podpovrchové vrstvy až do hloubky stovky metrů, kde mohou být detekovány oblasti zmrzlé vody nebo dokonce vody v tekutém stavu. Samozřejmě mohou být zjišťovány i vrstvy o jiných geologických vlastnostech.
Televizní kamera ve spojení s dalekohledem má být schopna zobrazovat krajinu na Marsu s rozlišením umožňujícím rozeznat detaily o velikosti několika decimetrů. Pomocí získaných snímků bude možné sestavit mapy povrchových útvarů a to i z pohledu mineralogického. Další přístroj má zaznamenávat atmosférické procesy při střídání ročních období a studovat odpařování vody, pohyb vody v atmosféře a registrovat vodní molekuly opouštějící atmosféru.
Vědecké vybavení
Na palubě je umístěno 6 přístrojů k vědeckým experimentům:
- HiRISE (High Resolution Imaging Science Experiment) – stereoskopická kamera s vysokým rozlišením určená k detailnímu snímkování povrchu Marsu (rozlišení až 30 cm na pixel),
- CRISM (Compact Reconnaissance Imaging Spectrometer for Mars) – kompaktní zobrazovací spektrometr pracující ve viditelném a blízkém infračerveném oboru,
- MCS (Mars Climate Sounder) – infračervený radiometr pro studium atmosféry,
- SHARAD (Shallow Radar) – sondážní radar umožňující zkoumat strukturu podpovrchových vrstev terénu,
- CTX (Context Imager) – kontextová kamera sloužící k informativnímu snímkování větších území,
- MARCI (Mars Color Imager) – barevný zobrazovač, který má za úkol monitorovat oblačnost a prachové bouře.
Kromě těchto vědeckých přístrojů pro průzkum Marsu se na sondě ještě provádějí tři technologické zkoušky:
- testy komunikačního a navigačního souboru Electra, který je určen jako retranslátor (převáděcí systém) mezi Zemí a budoucími marsovskými sondami v pásmu UHFPásmo UHF – Ultra High Frequency, mikrovlnné pásmo vysokých frekvencí v rozmezí 30 MHz až 3 GHz. V tomto pásmu vysílá televize, využívají ho mobilní sítě i systémy GPS pro přesné zjišťování polohy za pomoci družic.,
- testy optické navigační kamery, která by měla být využita pro navigaci budoucích planetárních sond,
- testy experimentální telekomunikační soustavy v pásmu KaPásmo Ka – mikrovlnné pásmo v oblasti 27,25 GHz až 36 GHz. Jde o pásmo s frekvencemi nad Kurtovým pásmem K, odsud je odvozený jeho název (Kurt above)., která se jeví jako perspektivní vysokovýkonný systém.
Technické podrobnosti
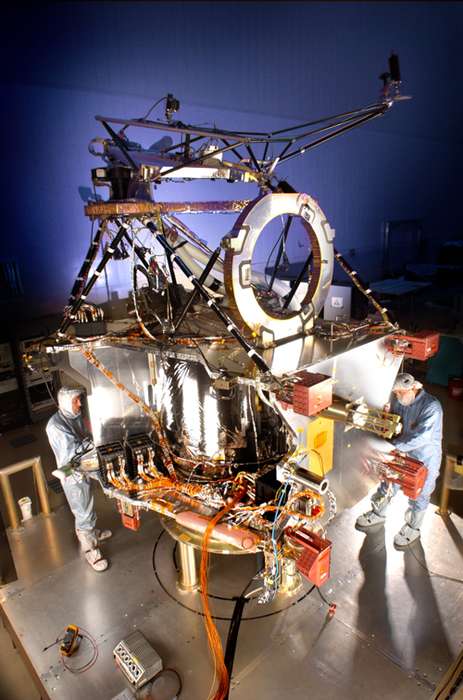

Nalevo: Kostra družice MRO. Napravo: Start družice MRO 12. 8. 2005 v 11:43 UT.
Základní těleso sondy MROMRO – Mars Reconnaissance Orbiter (Průzkumná oběžnice Marsu), sonda NASA, která získává detailní informace o vybraných místech na Marsu, zejména s ohledem na přítomnost vody v minulosti i v současnosti. Sonda startovala v srpnu 2005 a na oběžnou dráhu byla navedena v březnu 2006. Rozlišení je pouhých několik decimetrů. Od ledna 2009 slouží také jako retranslační stanice. V roce 2015 detekovala na Marsu tekoucí vodu. je nepravidelného tvaru o výšce 6,5 m, je vyrobeno z titanu, uhlíkových kompozitů a hliníkové voštiny. K tělesu jsou připojena dvě křídla solárních panelů velkých 5,35×2,53 m o rozpětí 13,6 m a parabola vysokoziskové antény o průměru 3 m. V základním tělese je umístěn pohonný systém, telekomunikační zařízení, povelový a řídící systém a vědecké přístroje. Maximální hmotnost sondy při startu je 2 180 kg, přičemž 1 149 kg tvoří pohonné látky a 139 kg vědecké přístroje.
Celkové náklady na misi činí 720 milionů USD. Z této částky tvoří přibližně 450 milionů USD cena sondy a vědeckého vybavení, 90 milionů USD nosná raketa a start sondy. Náklady na letové operace, zpracování výsledků a retranslační provoz sondy po dobu 5,5 let se odhadují na 180 milionů USD.
První snímky
První snímky pocházejí z období od 29. 9. 2006 do 6. 10. 2006. Přestože hlavním úkolem byla generální zkouška přístrojů, snímky mají již teď mimořádně velkou vědeckou hodnotu a o jejích kráse ani nemluvě.
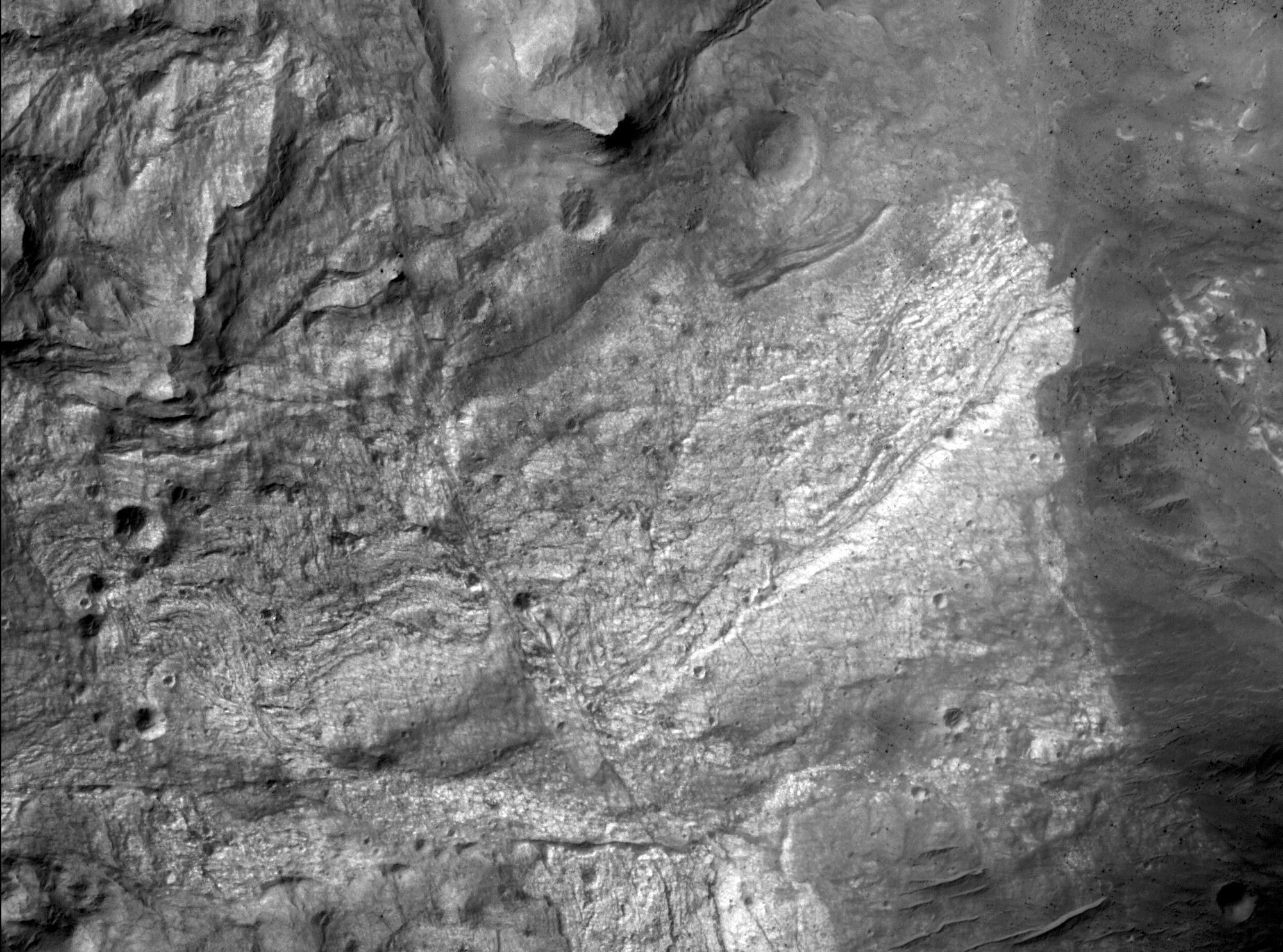
První snímek pořízený MRO, dno údolí Lus Chasma.
Po skončení aerobrakinguAerobraking – způsob brzdění, který využívá tření atmosféry planety k pozvolnému sestupu kosmické lodi. Zpravidla se tohoto manévru využívá ke snížení výšky oběžné dráhy. pořídila kamera HiRISE dne 29. 9. 2006 první zkušební snímky z operační oběžné dráhy. První obrázek zachycuje dno údolí Lus Chasma, což je součást rozsáhlého systému kaňonů Valles Marineris. Snímek byl pořízen z výšky 297 km a s rozlišením 0,297 m/pixel. Střed snímku se nachází v bodě o souřadnicích 7,8° JŠ a 80,5° ZD. Sever je nahoře. Snímek byl pořízen v 15:30 místního času a scéna je osvětlena ze západu pod úhlem 59,7°. Zobrazen je pouze malý fragment celkového snímku (označení TRA_000823_1720). Na snímku jsou vidět projevy celé škály procesů, které jsou zodpovědné za geologickou tvářnost krajiny. Jsou zde patrná obnažená vrstevnatá geologická podloží, což by mohly být usazené horniny (důsledek účinků vody nebo vzduchu). Některá skaliska jsou přelámaná a přesunutá přes sebe, což ukazuje na značná pnutí, která utvářela krajinu. Tmavý materiál na pravé straně obsahuje spoustu kamenů. Na snímku lze rozlišit kameny menší než 90 cm. Na pravém spodním okraji je vidět několik písečných dun.

-
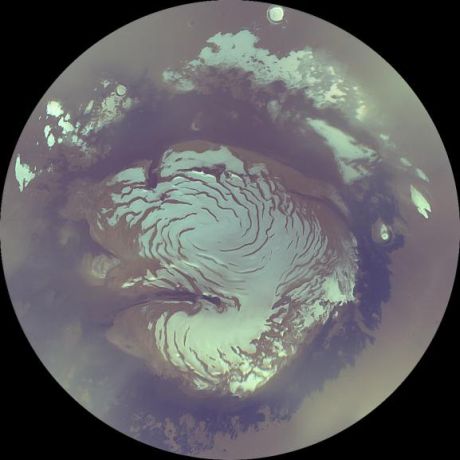
Mozaika složená ze čtyř polárních pohledů na Mars s šestihodinovým odstupem...
-
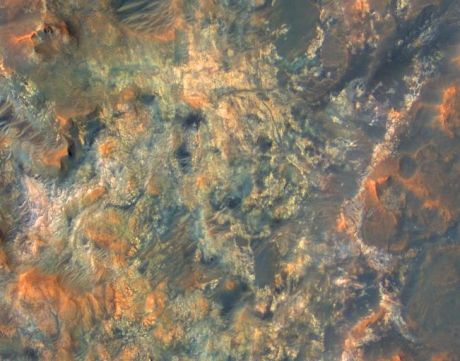
Úbočí kráteru v Terra Sirenum z 1. 10. 2006. Oblast má šířku asi 352 m. Původní rozlišení 25 cm/pixel.
-
Rokle v kráteru regionu Terra Sirenum z 3. 10. 2006. Oblast má asi 254 m na šířku. Část snímku je ještě ve tmě.
-
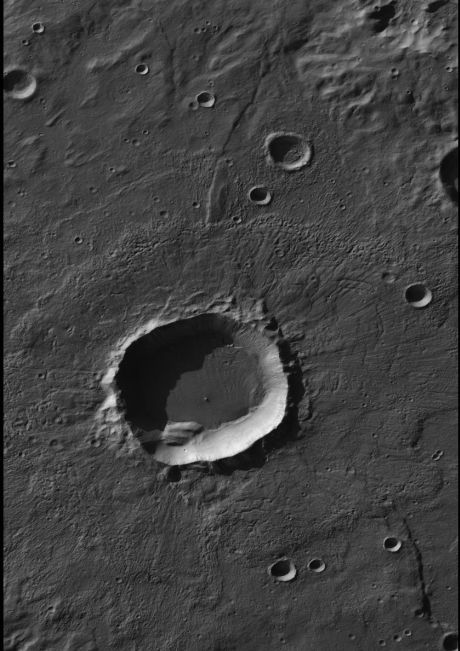
Kráter v oblasti Terra Sirenum.
-
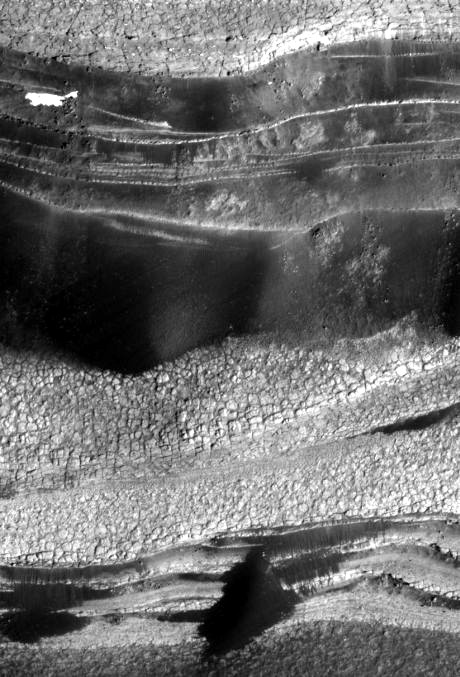
Severní oblast Chasma Boreale z 1. 10. 2006, šířka oblasti 568 m. Původní rozlišení 64 cm/pixel.
-
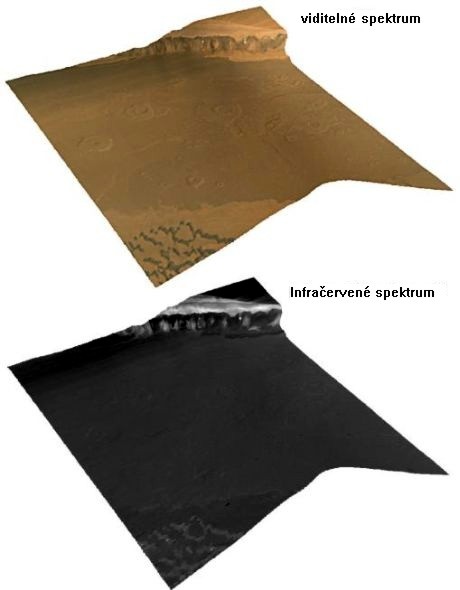
Chasma Boreale z 1. 10. 2006 v 10:51, 13 km dlouhá a v nejužším bodu 9 km široká. Původní rozlišení 18 m/pixel. Nahoře vizuální, dole IR obor.
Zajímavost
Dne 3. 10. 2006 byla pořízena velmi zajímavá barevná fotografie kráteru Victoria. Na snímku je vidět vozítko (rover) Opportunity, které se v té době pohybovalo v těsné blízkosti kráteru. Vozítka Spirit a Opportunity jsou součástí americké mise Mars ExplorationMars Exploration – mise NASA k Marsu s dvěma sondami, které byly vypuštěny ve dnech 10. 6. 2003 a 7. 7. 2003. Obě sondy obsahují orbitální modul a přistávací modul s výzkumným vozítkem (roverem). Modul Spirit úspěšně přistál na povrchu Marsu dne 3. 1. 2004, modul Opportunity přistál na opačné straně Marsu 24. 1. 2004.. Na snímku v plném rozlišení jsou vidět nejen brázdy za koly vozítka, ale i stín stožáru, na kterém je na vozítku umístěná kamera.
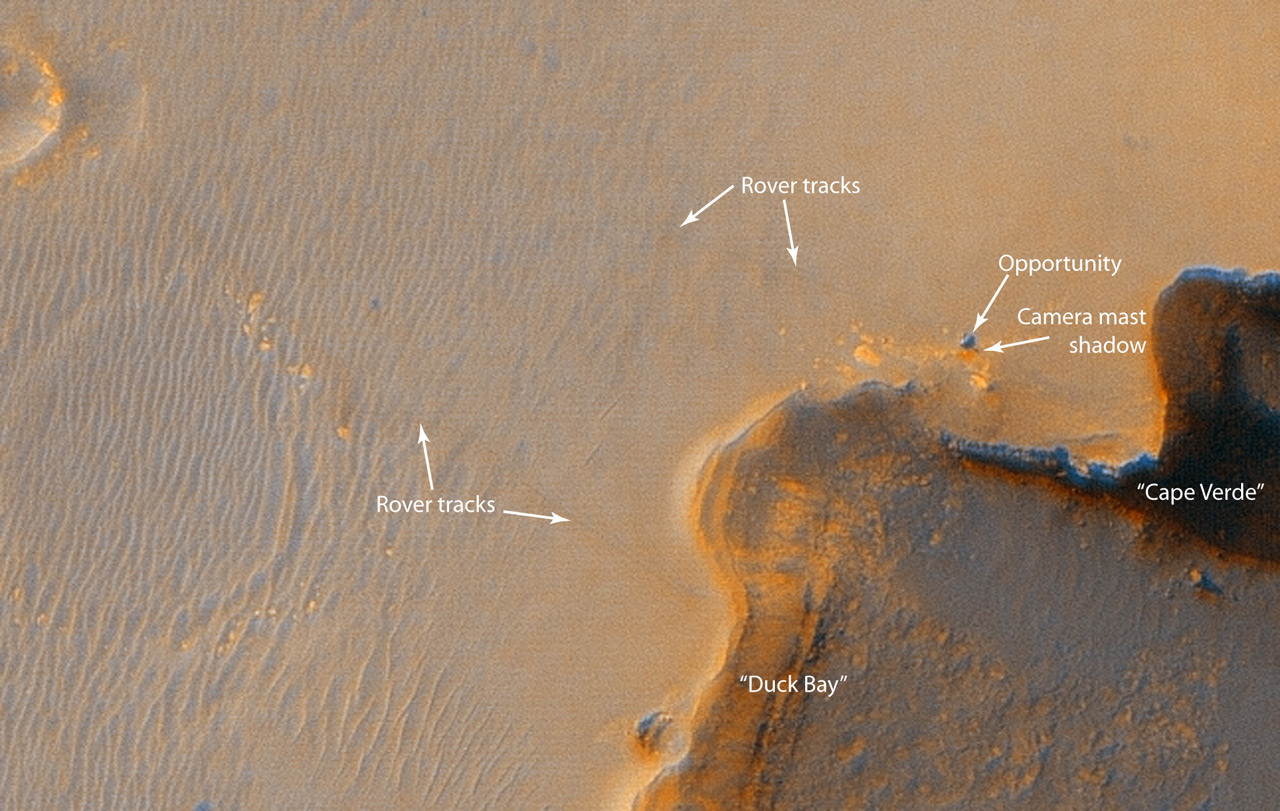
Vozítko Opportunity zachycené družicí MRO na okraji kráteru Victoria.
Klip týdne

Mars – kamera HiRISE na sondě MRO. Sonda MRO (Mars Reconnaissance Orbiter) pracuje na oběžné dráze Marsu od března 2006. Na palubě má zatím nejkvalitnější kameru, jaká kdy byla použita u planetární výpravy. Kamera má rozlišení v pouhých desítkách centimetrů z výšky 200 až 300 kilometrů nad povrchem. Na klipu vidíte vůbec první záběry pořízené při testech kamery. Jde o dno údolí Lus Chasmas, část rozsáhlého systému kaňonů Valles Marineris. (mpeg, 4 MB)
Odkazy
A. Havlíček: Databáze kosmických sond pro průzkum těles Sluneční soustavy
![]()
![]()
